
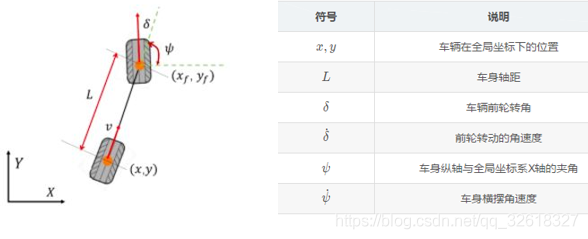
基于車輛運(yùn)動(dòng)學(xué)模型的控制方法
車輛運(yùn)動(dòng)學(xué)模型 基于車輛運(yùn)動(dòng)學(xué)模型的控制方法主要考慮了車輛的運(yùn)動(dòng)學(xué)約束對(duì)車輛控制的影響。 平時(shí)見到的....
無人駕駛車輛的反饋控制介紹
1.1 無人駕駛車輛 大到類似百度apollo無人車,無人配送車,小到掃地機(jī)器人,其實(shí)都是無人駕駛車....
機(jī)器人中特殊的消息類型
圖像信息 MATLAB提供了對(duì)圖像消息的支持,其消息類型始終為sensor_msgs/Image。 ....
如何將ROS數(shù)據(jù)類型轉(zhuǎn)換為MATLAB數(shù)據(jù)類型
** Message數(shù)據(jù)轉(zhuǎn)化** 由于在Matlab中,ROS消息的每個(gè)元素是獨(dú)立的,因此無法驗(yàn)證具....

在MATLAB中如何保存和加載消息
保存和加載消息 您可以保存消息并存儲(chǔ)內(nèi)容以供以后使用。 例如從訂閱者獲取一條新消息。 posedat....
ROS中如何設(shè)置消息信息
設(shè)置消息信息 ROS 消息是結(jié)構(gòu)??梢灾苯訌?fù)制它們以生成新的消息。副本和原始消息都有自己的數(shù)據(jù)。創(chuàng)建....
MATLAB消息結(jié)構(gòu)獲取方法
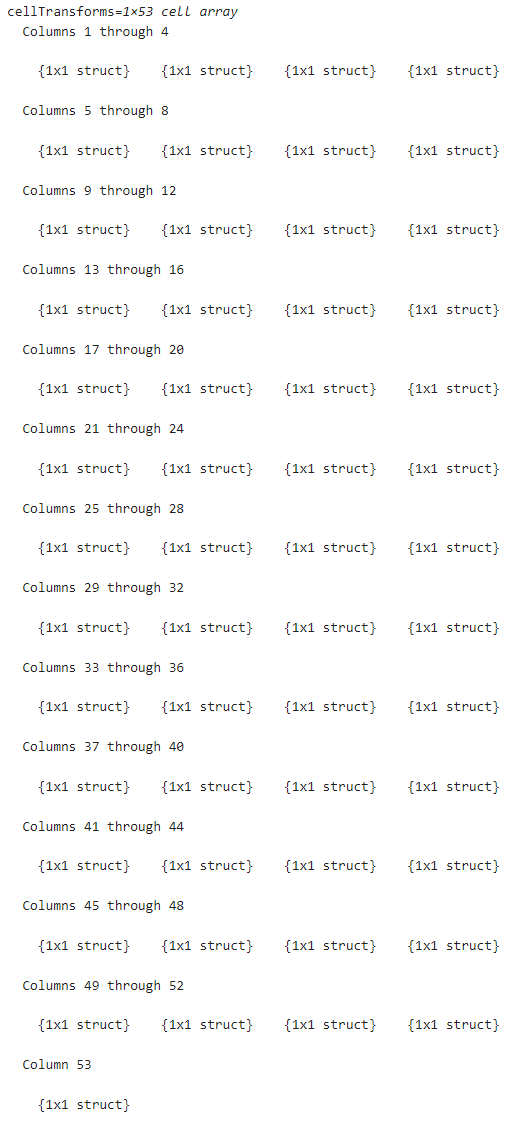
消息結(jié)構(gòu)獲取 ROS消息是對(duì)象,消息數(shù)據(jù)存儲(chǔ)在屬性中。MATLAB具有方便的方法來查找和探索消息的內(nèi)....
如何在MATLAB查找消息類型
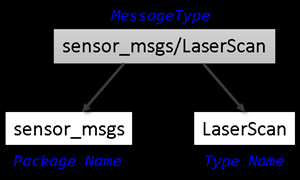
消息是ROS中交換數(shù)據(jù)的主要容器。主題和服務(wù)使用消息在節(jié)點(diǎn)之間傳輸數(shù)據(jù)。為了標(biāo)識(shí)其數(shù)據(jù)結(jié)構(gòu),每條消息....
OriginBot軌跡跟蹤運(yùn)行案例
運(yùn)行案例 啟動(dòng)底盤和雷達(dá) SSH連接OriginBot成功后,在終端中輸入如下指令,啟動(dòng)機(jī)器人底盤和....
Python中selenium元素的操作方式
元素的操作方式 send_keys() 解釋:用于向輸入框等可輸入元素中發(fā)送文本內(nèi)容 用法: ele....
Python中如何進(jìn)行selenium自動(dòng)化操作
開始使用 1.打開瀏覽器定位頁面 準(zhǔn)備工作都完成后,接下來是打開瀏覽器了,這里我們以百度為例。 # ....
Python中使用selenium的準(zhǔn)備工作
定義 Selenium是一個(gè)用于Web應(yīng)用程序測(cè)試的自動(dòng)化測(cè)試工具。使用Selenium可以驅(qū)動(dòng)瀏覽....

PID參數(shù)整定實(shí)際調(diào)參
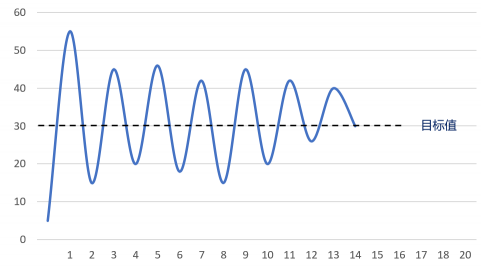
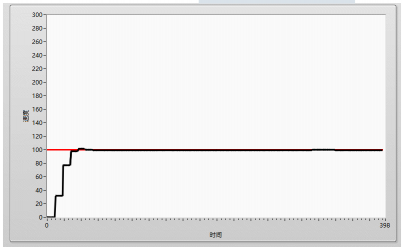
實(shí)際調(diào)參 從實(shí)際的 PID 系統(tǒng)曲線來理解 PID 各個(gè)系數(shù)的調(diào)節(jié)效果。 ① 先調(diào)整比例系數(shù),積分、....
PID臨界比例法和一般調(diào)節(jié)法介紹
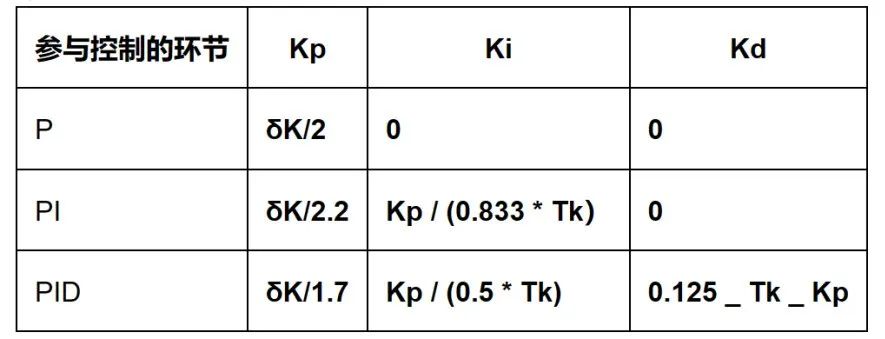
臨界比例法 內(nèi)容 在閉環(huán)的控制系統(tǒng)里,將調(diào)節(jié)器置于純比例作用下,從小到大逐漸調(diào)節(jié)比例系數(shù),直到系統(tǒng)曲....
PID參數(shù)整定試湊法介紹
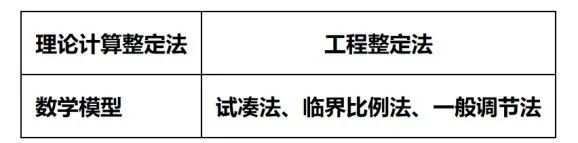
PID 參數(shù)整定方法 理論計(jì)算整定法:依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過理論計(jì)算確定 PID 參數(shù)。 這種方法....
PID參數(shù)采樣周期選擇
在學(xué)習(xí) PID 算法的參數(shù)整定的時(shí)候,每一個(gè)系統(tǒng)的 PID系數(shù)是不通用的,在不同的系統(tǒng)中運(yùn)用同樣的 ....
智能車方向控制舵機(jī)PWM技術(shù)
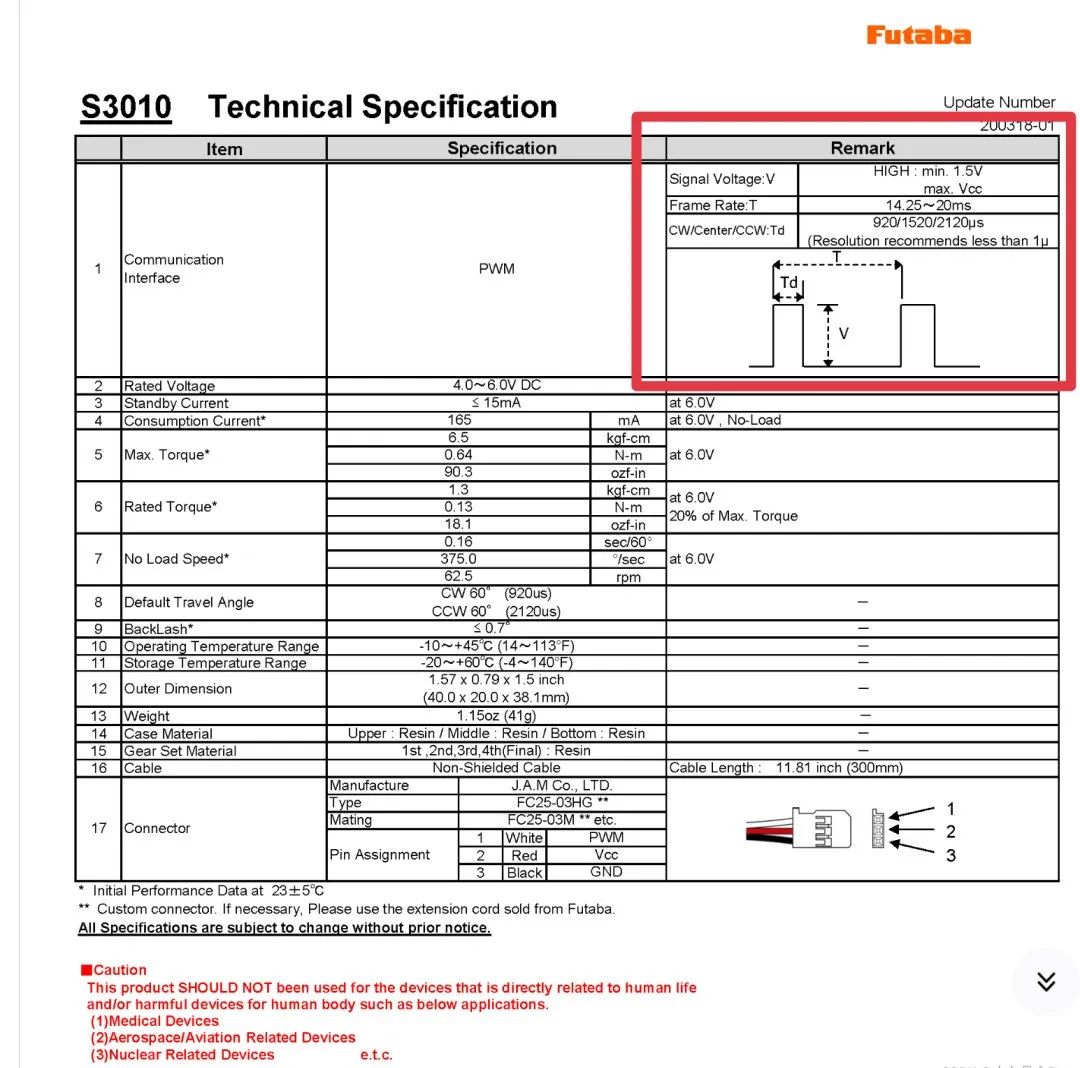
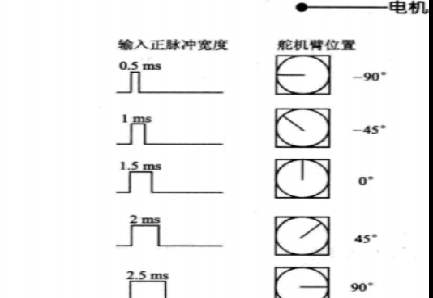
舵機(jī) 舵機(jī)是一種位置(角度)伺服的驅(qū)動(dòng)器,我們可以通過給信號(hào)腳不同的占空比來讓舵機(jī)進(jìn)行打角進(jìn)而控制小....
方向控制環(huán)節(jié)與控制量
控制環(huán)節(jié)與控制量 整個(gè)系統(tǒng)的控制器就是偏差處理函數(shù),方向環(huán)多為離散的PD控制器(PD控制器會(huì)在后面P....
智能車方向控制典型環(huán)節(jié)分析
方向控制 典型環(huán)節(jié)對(duì)應(yīng) 由于車模結(jié)構(gòu)的不同,小車方向控制的各環(huán)節(jié)會(huì)有所區(qū)別,例如L車、B車的執(zhí)行結(jié)構(gòu)....

自動(dòng)控制原理是什么
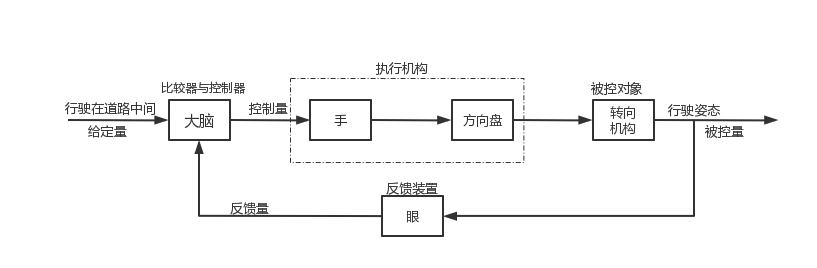
自動(dòng)控制理論 為了更好地理解“控制”,我們復(fù)習(xí)一下自動(dòng)控制原理的相關(guān)理論知識(shí)。 人工控制系統(tǒng) 首先,....
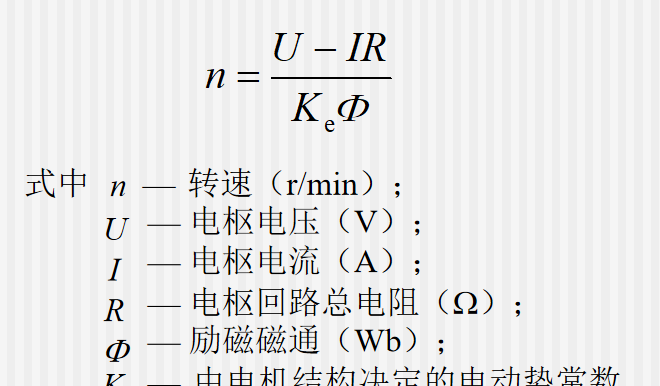
淺談智能車的直流調(diào)速系統(tǒng)
直流電動(dòng)機(jī)的穩(wěn)態(tài)轉(zhuǎn)速方程可以表示為: 根據(jù)上式,從數(shù)學(xué)的角度可以得知,直流電機(jī)有三種調(diào)節(jié)轉(zhuǎn)速的方法:....
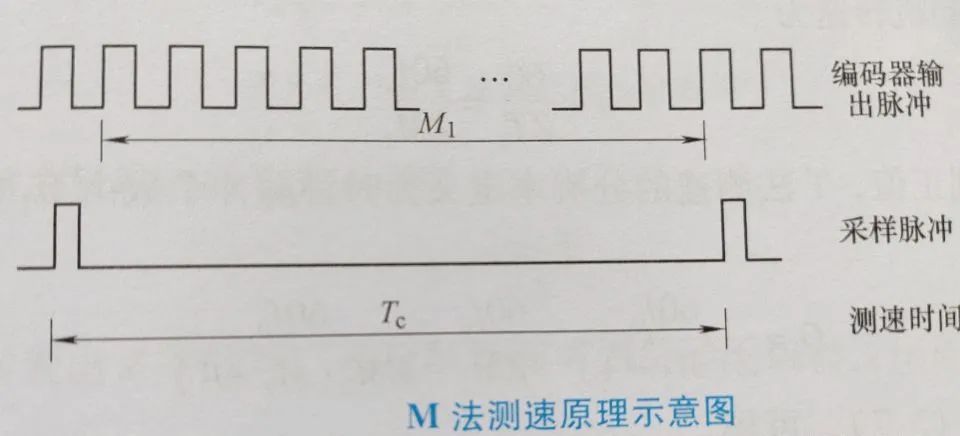
運(yùn)動(dòng)控制系統(tǒng)反饋環(huán)節(jié)介紹
反饋環(huán)節(jié) 此處的反饋環(huán)節(jié)是使用的增量式旋轉(zhuǎn)編碼器(常見旋轉(zhuǎn)編碼器分為絕對(duì)式和增量式感興趣的小伙伴自己....
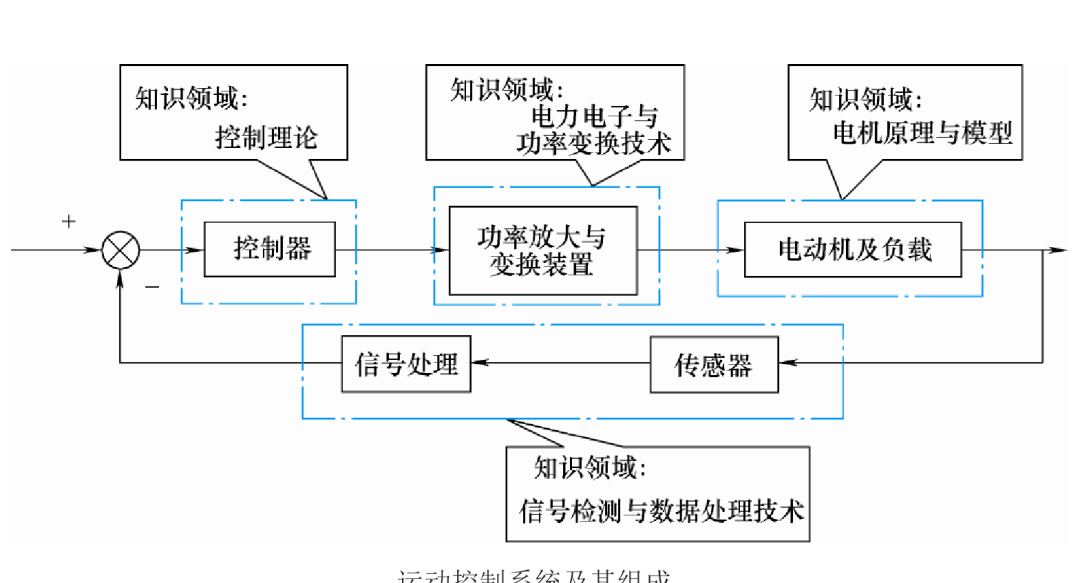
智能車的運(yùn)動(dòng)控制系統(tǒng)介紹
運(yùn)動(dòng)控制系統(tǒng)是通過控制電機(jī)電壓、電流、頻率等輸入量,來滿足工作機(jī)械的轉(zhuǎn)矩、速度、位移等機(jī)械量,使各種....
如何權(quán)衡阻抗控制性能與穩(wěn)定性的關(guān)系
阻抗控制性能提升后對(duì)穩(wěn)定性有怎樣的影響?如何權(quán)衡阻抗控制性能與穩(wěn)定性的關(guān)系? 當(dāng)阻抗控制性能提升時(shí),....
限制阻抗控制性能優(yōu)化的因素是什么
阻抗控制存在哪些科學(xué)問題?限制阻抗控制性能優(yōu)化的因素是什么? 環(huán)境建模問題:阻抗控制需要對(duì)環(huán)境進(jìn)行建....
力控通常分為幾種類型
力控通常分為哪些? 力限制控制(Force-Limited Control):控制機(jī)器人末端執(zhí)行器的....
什么是力控機(jī)器人 優(yōu)點(diǎn)有哪些
(1)什么是力控機(jī)器人? 力控機(jī)器人(force-controlled robot)是指一類具有力控....
自動(dòng)駕駛特征點(diǎn)處理算法
1. Ramer-Douglas-Peucker Ramer-Douglas-Peucker,又稱拉....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)