
六自由度機(jī)械臂三次多項式插值法
對串聯(lián)機(jī)械臂而言,軌跡規(guī)劃可以分為:關(guān)節(jié)空間軌跡規(guī)劃和笛卡爾空間軌跡規(guī)劃。關(guān)節(jié)空間軌跡規(guī)劃是把機(jī)器人....
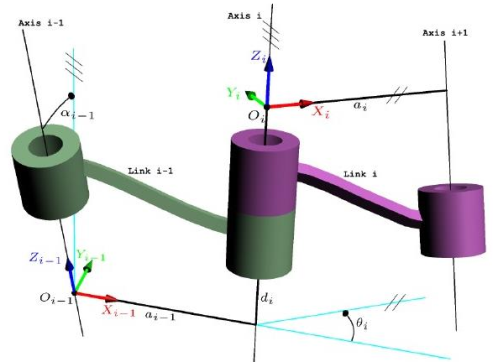
機(jī)械臂結(jié)構(gòu)是什么樣的
該機(jī)械臂 6 個關(guān)節(jié)都是轉(zhuǎn)動關(guān)節(jié),前 3 個關(guān)節(jié)確定手腕參考點的位置,后 3個關(guān)節(jié)確定手腕的方位。和....
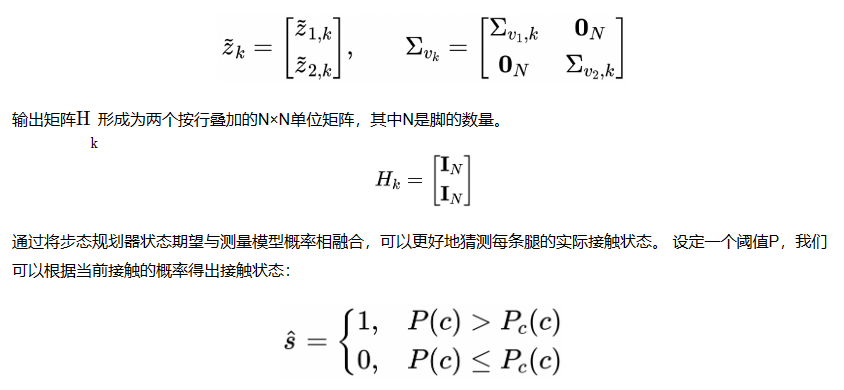
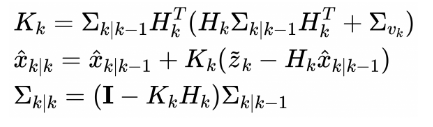
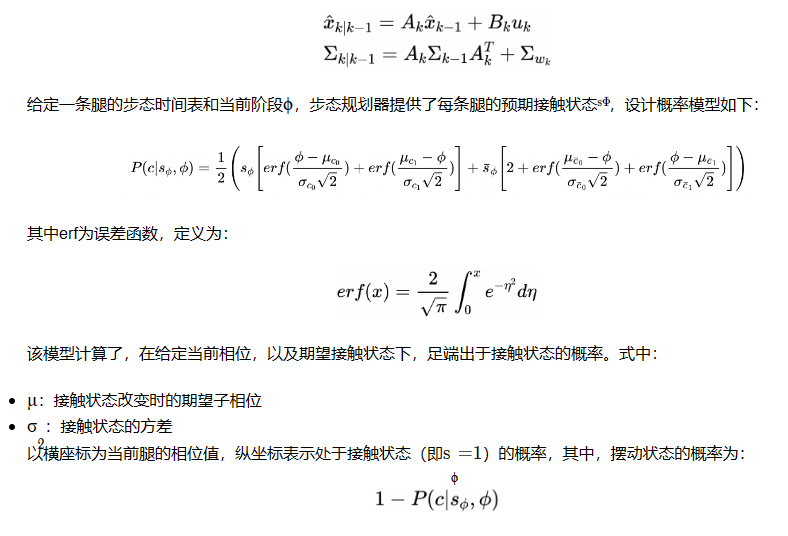
四足機(jī)器人接觸檢測和模型
接觸檢測 步態(tài)規(guī)劃器給出的接觸序列是嚴(yán)格按照時間進(jìn)行周期性計算的。而在實際運行當(dāng)中,由于地形的不平整....
四足機(jī)器人的步態(tài)規(guī)劃測試代碼
步態(tài)規(guī)劃 因為我們的四足機(jī)器人足端,是在不停地與地面接觸,懸空(擺動),所以這里說的步態(tài)規(guī)劃,其實指....
四足機(jī)器人周期函數(shù)效果演示
這里簡單利用一個線性函數(shù)進(jìn)行演示 取a=1,b=1,其圖像隨時間變化如下: 利用周期函數(shù)對時間進(jìn)行調(diào)....
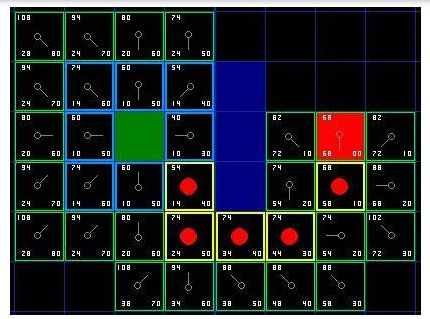
四足機(jī)器人步態(tài)規(guī)劃與接觸狀態(tài)
0、步態(tài)規(guī)劃 四足機(jī)器人控制當(dāng)中,步態(tài)是至關(guān)重要的一項。我們可以簡單理解成四足機(jī)器人運動過程中各腿的....

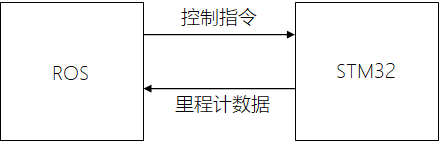
機(jī)器人自主導(dǎo)航控制指令的下發(fā)與接收
1.通信協(xié)議 控制指令格式(15字節(jié)) 2.ROS端 在ROS端,首先需要接收從其他節(jié)點的控制消息,....

機(jī)器人里程計數(shù)據(jù)的上傳與接收
1.通信協(xié)議 里程計數(shù)據(jù)格式(19字節(jié)) 2.STM32端 /** * @brief 發(fā)送里程計數(shù)據(jù)....

電機(jī)驅(qū)動器有哪幾種
驅(qū)動器有哪些? 2.1 有刷電機(jī)驅(qū)動器 直流有刷電機(jī)的驅(qū)動方法其實本質(zhì)上是使用 H 橋電路進(jìn)行驅(qū)動,....
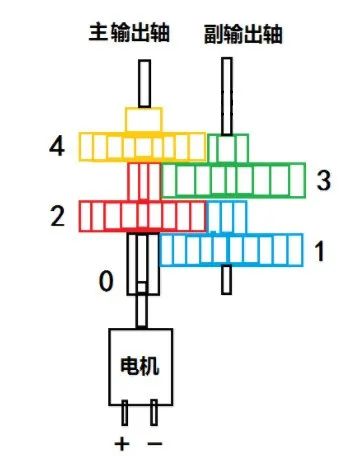
舵機(jī)是什么 各類電機(jī)的特點
舵機(jī) 舵機(jī)是一種“特殊”的直流電機(jī),其構(gòu)造不僅只有電機(jī)部分,而且還自帶一個控制器,所以舵機(jī)本身就是一....
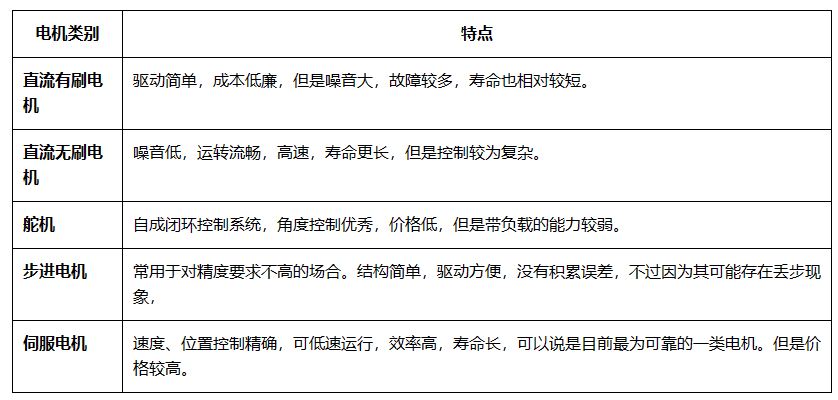
伺服電機(jī)介紹 電機(jī)常用名詞有哪些
伺服電機(jī) “伺服”一詞是來源于希臘語“奴隸”的意思,那么伺服電機(jī)也可以理解為絕對服從控制信號指揮電機(jī)....
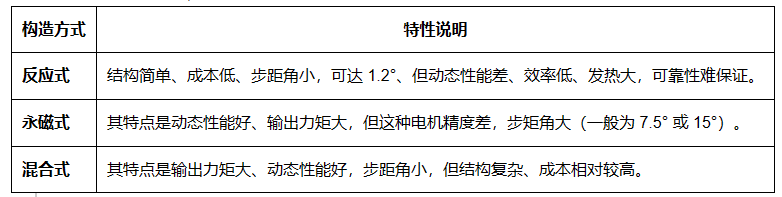
步進(jìn)電機(jī)分類及特點
步進(jìn)電機(jī) 步進(jìn)電機(jī)是一種將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主....
直流電機(jī)是什么 直流電機(jī)有幾種
直流電機(jī) 在直流電機(jī)中還分為普通的直流電機(jī)、直流減速電機(jī),有刷和無刷,共分為: 直流有刷電機(jī) 直流有....
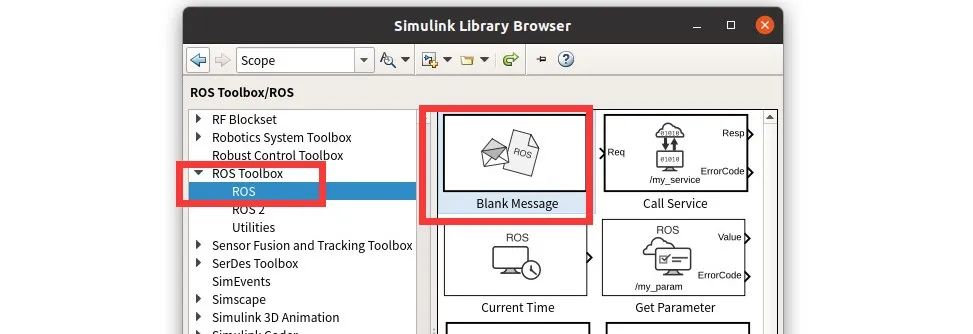
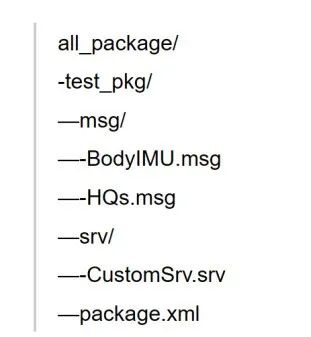
Matlab中創(chuàng)建一個Message方法
創(chuàng)建一個空白ROS消息,并用機(jī)器人路徑的X和Y位置填充它。然后將更新后的ROS消息發(fā)布到ROS網(wǎng)絡(luò)。....
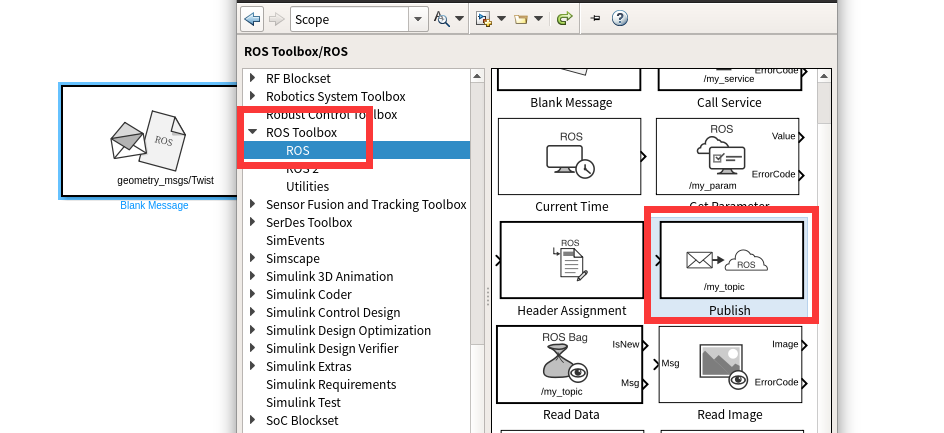
Simulink中如何創(chuàng)建一個Publisher
創(chuàng)建一個Publisher 配置一個block,并向/location的節(jié)點發(fā)送一條geometry....
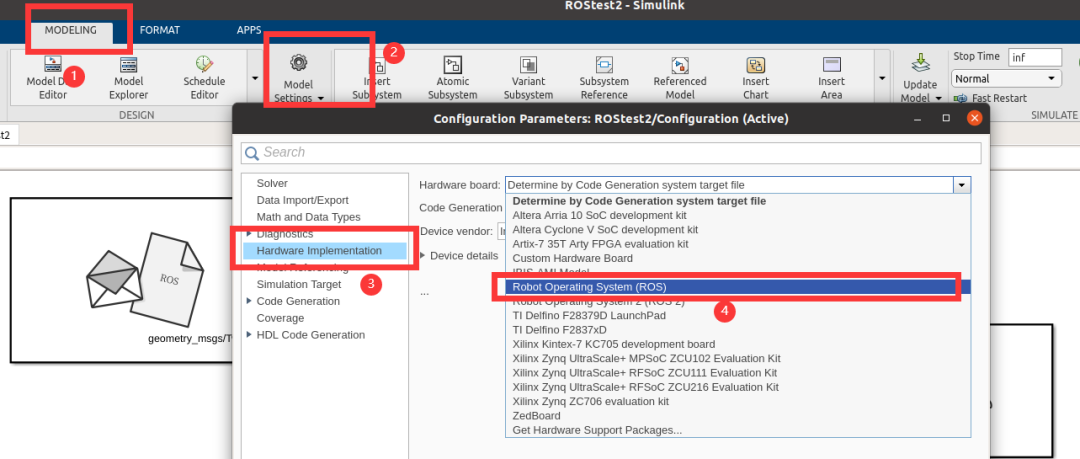
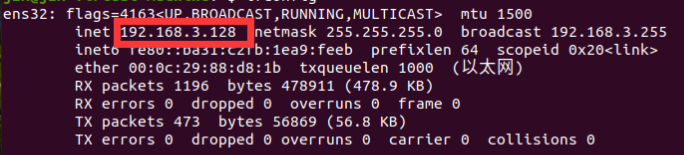
如何初始化ROS并創(chuàng)立鏈接
Simulink對機(jī)器人操作系統(tǒng)(ROS)的支持使我們能夠創(chuàng)建與ROS網(wǎng)絡(luò)一起工作的Simulink....
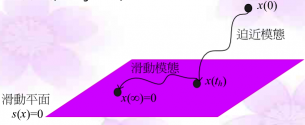
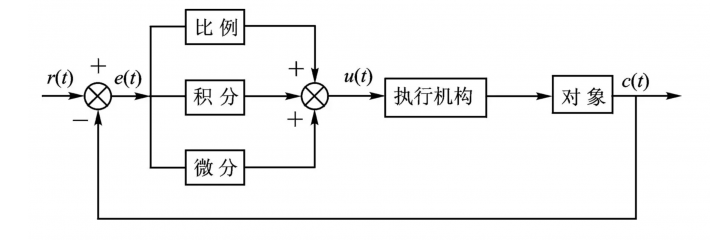
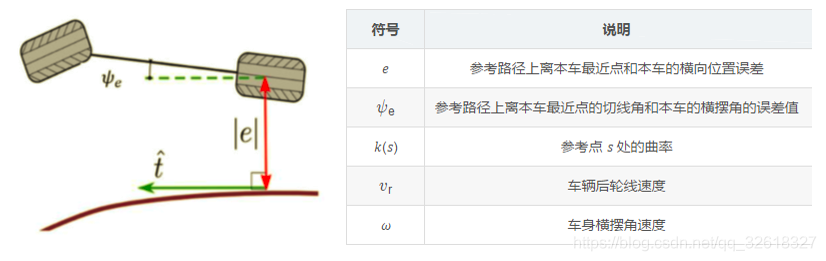
基于車輛運動學(xué)和動力學(xué)模型的橫向控制算法
無模型的 PID 橫向控制算法參數(shù)少,簡單易用,但是由于沒有考慮車輛系統(tǒng)動力學(xué)特性及路徑本身的動態(tài)變....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)