自動駕駛的關鍵挑戰(zhàn)之一是準確感知和解釋車輛周圍環(huán)境的能力�����。這需要使用各種傳感器���,如相機�、激光雷達和雷....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-14 11:49
?786次閱讀
BEV感知的二維特征點 首先來簡單介紹一下什么是BEV感知�。 BEV感知(Bird’s Eye Vi....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-14 11:37
?711次閱讀
空函數(shù) 如果想定義一個什么事也不做的空函數(shù),可以用pass語句 def nop (): pass p....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-14 11:33
?590次閱讀
一��、Python3 函數(shù) 函數(shù)是組織好的���,可重復使用的�����,用來實現(xiàn)單一���,或相關聯(lián)功能的代碼段。 函數(shù)能....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-14 11:26
?745次閱讀
形參的分類 形參的分類可以分為六種: 帶有默認值的位置形參 不帶默認值的位置形參 帶有默認值的關鍵字....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-14 11:19
?850次閱讀
一�、函數(shù)參數(shù)的分類 函數(shù)的參數(shù)分為兩類:形參 及 實參 形參:形參是在創(chuàng)建過程中聲明的參數(shù),如果不給....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-14 11:13
?2792次閱讀
有參數(shù)重試 (1) stop_max_attempt_number 在retry中傳入stop_ma....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-14 11:08
?841次閱讀
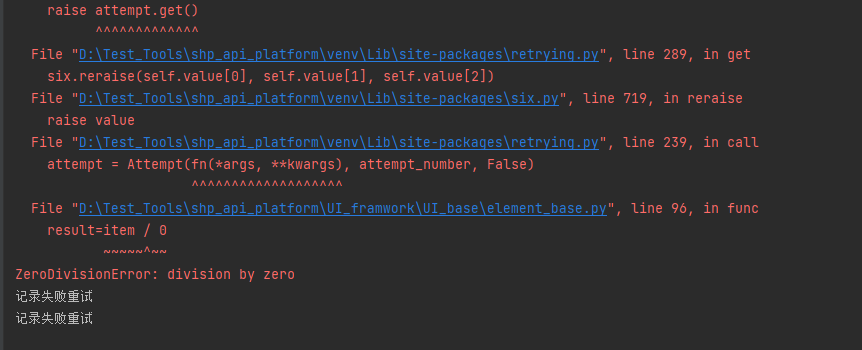
在編程的時候,我們難免會遇到一些不可靠的情況,比如網(wǎng)絡請求失敗,數(shù)據(jù)庫連接超時等等��。這些不確定性會讓....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-14 11:01
?529次閱讀
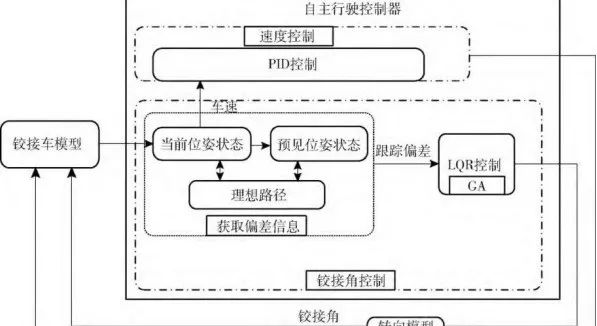
PID控制 PID控制又稱比例-積分-微分控制器����。在自動駕駛汽車跟蹤控制中,該算法主要是對車輛反饋的....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 17:50
?5546次閱讀
MPC控制 模型預測控制(Model predictive control��,MPC)從上世紀70年代....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 17:44
?11486次閱讀
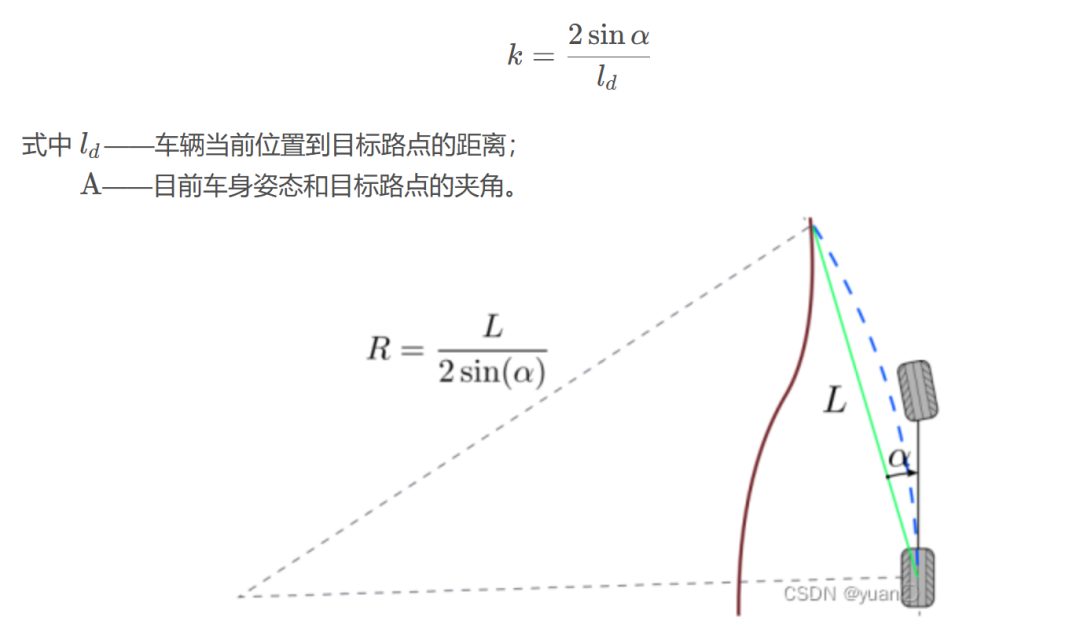
2.1 基于自行車模型的路徑跟蹤控制算法 2.1.1 純跟蹤控制(Pure Pursuit)算法 純....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 17:36
?893次閱讀
行為決策在自動駕駛系統(tǒng)架構中的位置 Claudine Badue等人以圣西班牙聯(lián)邦大學(UFES)開....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 17:30
?778次閱讀
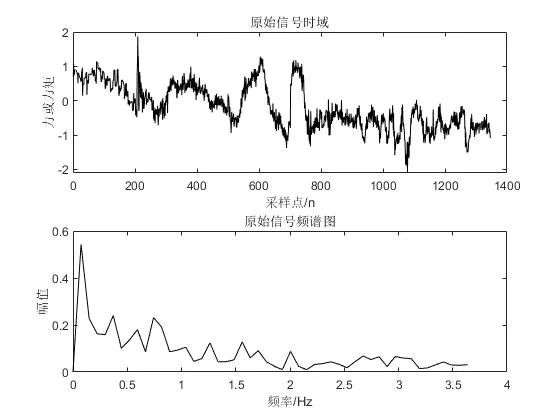
下面舉一些例子,實現(xiàn)對機器人接觸力的數(shù)據(jù)濾波��! 首先是導入數(shù)據(jù): clc clear all ; c....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 17:23
?559次閱讀
具有單軸力傳感器的單關節(jié)機械臂接觸力估計: 接觸力估計需要考慮多個因素進行補償���,以提高估計的準確性��。....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 17:08
?679次閱讀
力控機器人本身關節(jié)具有力傳感器,可為什么還需要接觸力濾波和估計呢�����?這是不是有些多余?顯然是不是的��,本....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 17:01
?520次閱讀
基于上面的原理,不管是q(t)是何種加減速算法生成���,都可以使用上面的時間縮放法進行時間同步���,下面以梯....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 16:56
?651次閱讀
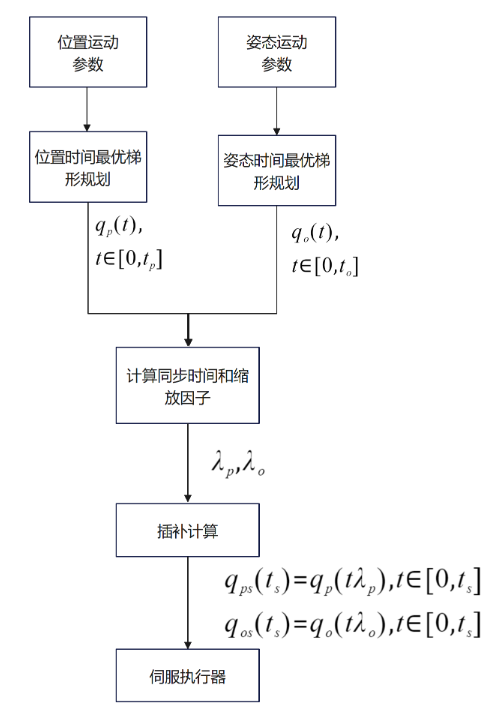
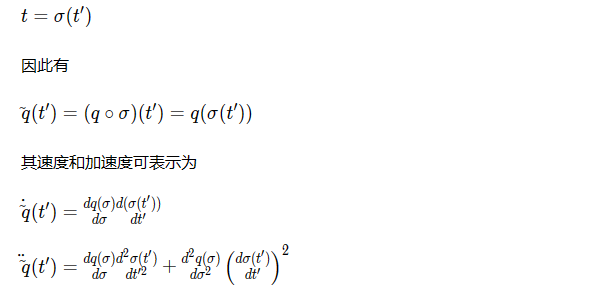
時間縮放法的初衷是用于修改軌跡�,避免軌跡違反系統(tǒng)飽和約束限制的�,我們先闡述其原理����,然后將其用于實現(xiàn)速....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 16:50
?535次閱讀
一般而言,多軸機器人的任務一般是通過控制末端工具的位置和姿態(tài)來完成,會涉及位置和姿態(tài)兩個量 , 所以....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 16:40
?897次閱讀
使用中斷 通過配置串口的接收作為中斷源�,開啟中斷輸出控制��,配置NVIC���。開啟中斷通道。 //開啟中斷....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 16:33
?636次閱讀
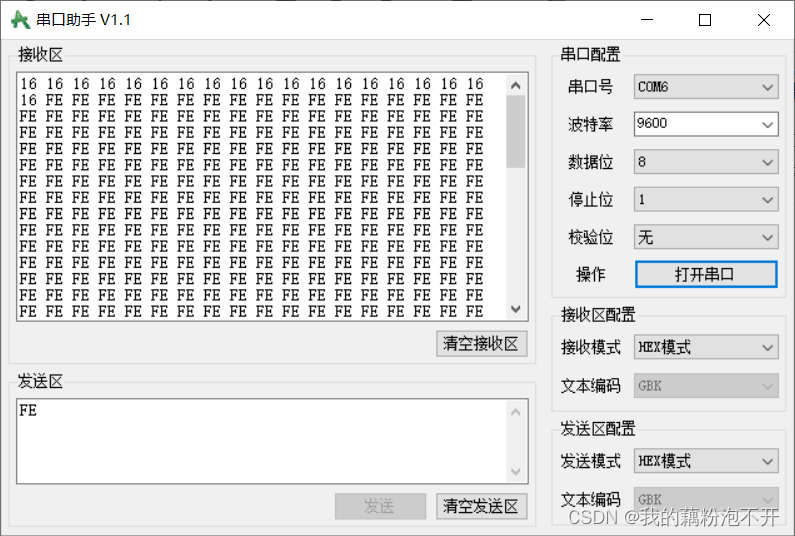
上方是發(fā)送數(shù)據(jù)的例子���,那么串口接收又該如何配置,又要在串口發(fā)送的例子上做哪些更改呢�? 這里我們可以通....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 16:20
?2438次閱讀

首先要明確幾點:使用STM32串口外設中的哪一個?串口發(fā)送或者接收數(shù)據(jù)?串口相關的參數(shù)配置��?發(fā)送或接....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 16:09
?2344次閱讀

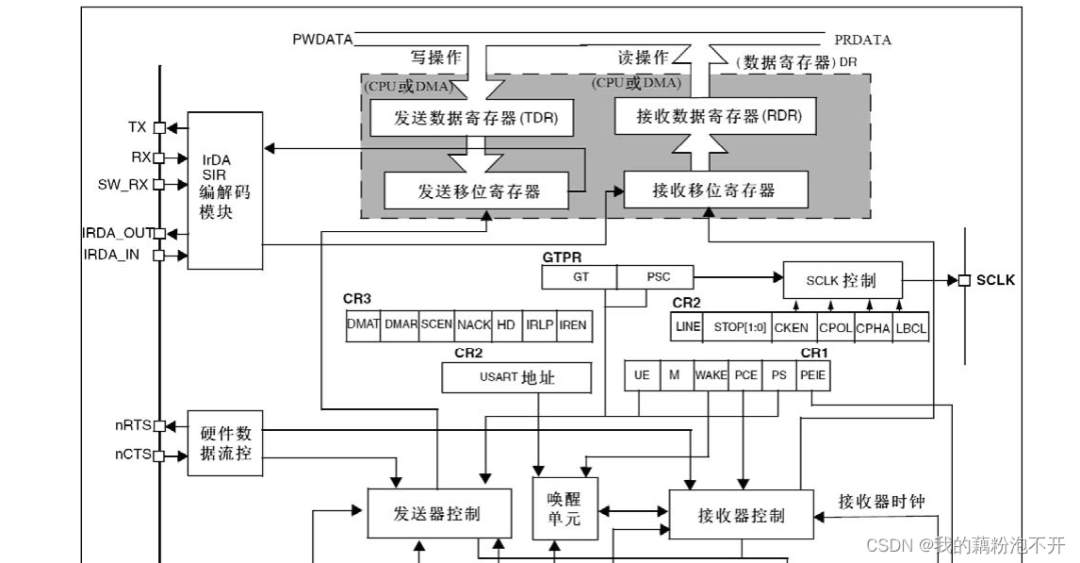
USART是STM32內部集成的硬件外設��,可以根據(jù)數(shù)據(jù)寄存器的一個字節(jié)數(shù)據(jù)自動生成數(shù)據(jù)幀時序����,從TX....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 16:04
?1653次閱讀
STM32里的串口通信 在STM32里��,串口通信是USART�,STM32可以通過串口和其他設備進行傳....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 15:58
?3274次閱讀
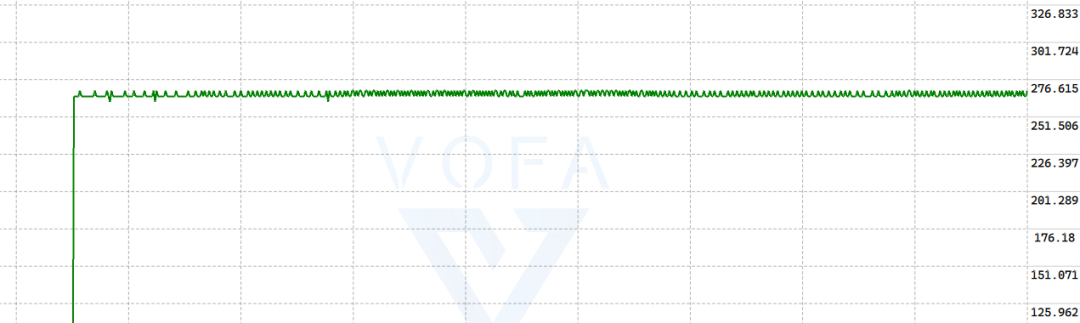
如果將測得的速度值用VOFA+上位機畫出來����,我們可能會看到這樣的曲線 從圖中我們可以看到��,速度值在目....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 15:48
?1196次閱讀
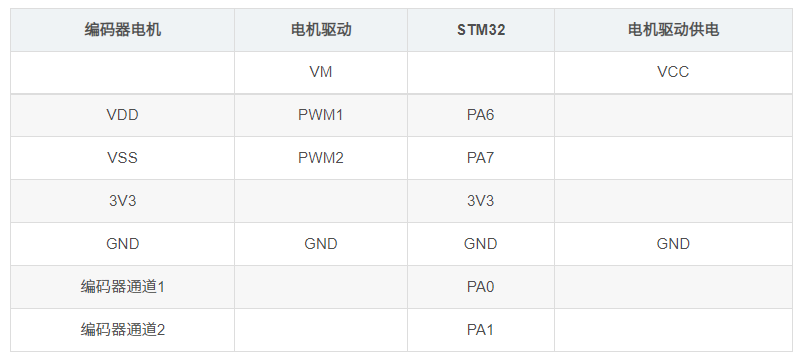
接線 編碼器電機�、電機驅動(這里用的L298n)�、STM32�、電源(可以是12V電池)的接線如下 3....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 15:39
?1413次閱讀
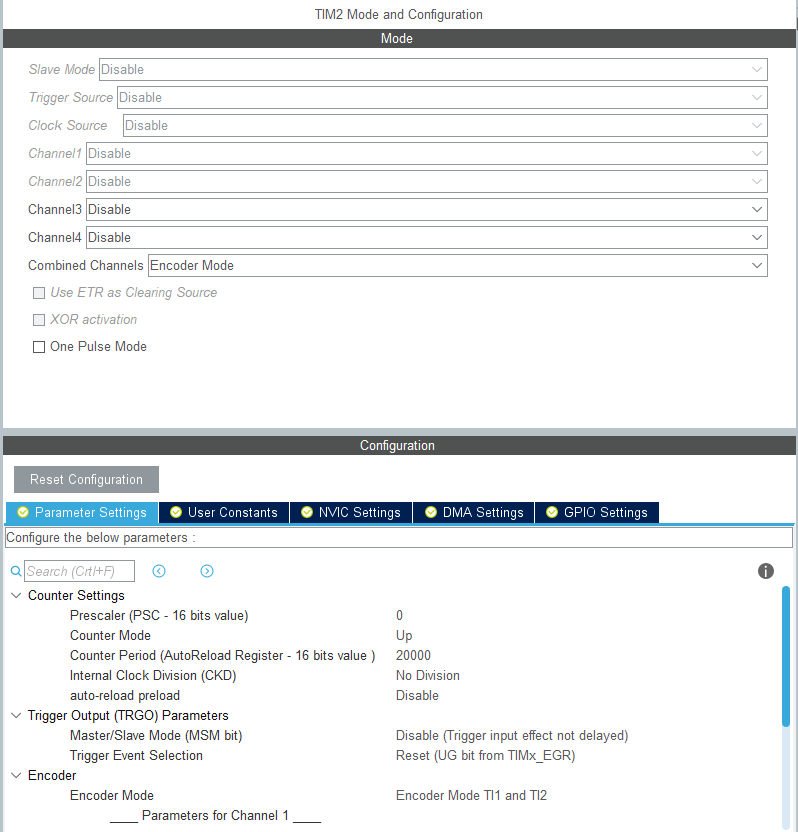
為了進行測速,我們一共需要3個定時器��,作用分別是:①輸出PWM�����;②編碼器模式進行脈沖計數(shù)�;③計時��,確....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 15:31
?1242次閱讀
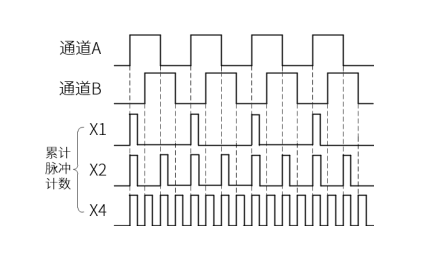
2.1 倍頻技術 編碼器會輸出兩路方波信號�,如果只在通道A的上升沿計數(shù)����,那就是1倍頻����;通道A的上升��、....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 15:28
?6193次閱讀
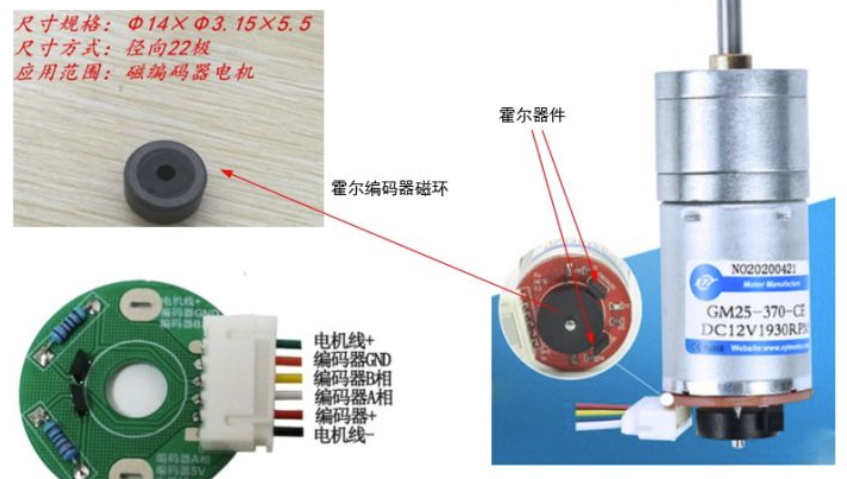
編碼器種類及原理 常見的編碼器有兩種���,分別為霍爾編碼器和GMR編碼器���。 1.1 霍爾編碼器 霍爾編碼....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-10 15:21
?2997次閱讀
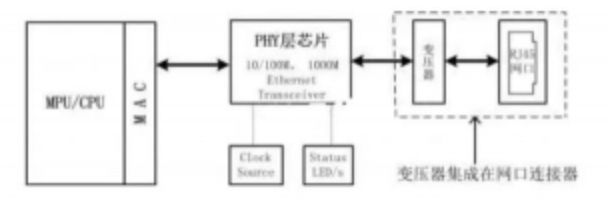
以太網(wǎng)是一種計算機局域網(wǎng)技術���。IEEE組織的 IEEE 802.3標準制定了以太網(wǎng)的技術標準����,它規(guī)定....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-09 18:14
?1471次閱讀
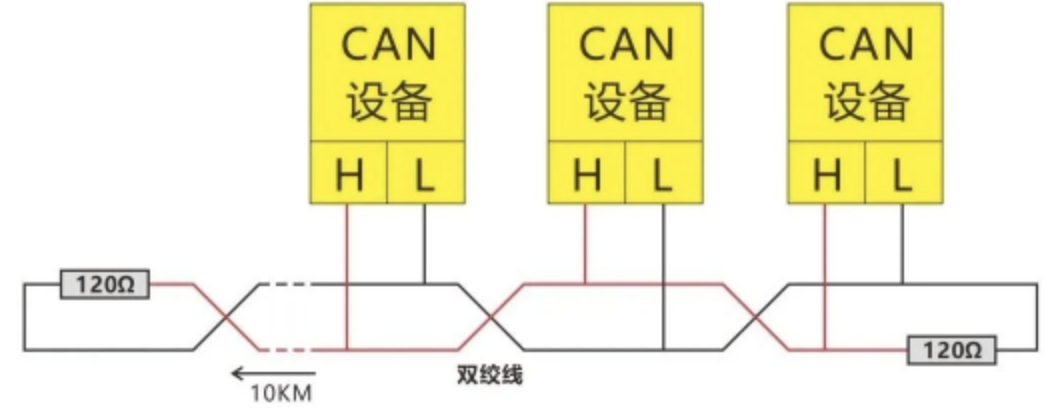
CAN總線 CAN是控制器局域網(wǎng)絡的簡稱��,是一種能夠實現(xiàn)分布式實時控制的串行通信網(wǎng)絡���。CAN總線的功....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-09 18:11
?1760次閱讀




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)