
車聯(lián)網(wǎng)體系結(jié)構(gòu)中主要包含哪三層
車聯(lián)網(wǎng)體系 車聯(lián)網(wǎng)是物聯(lián)網(wǎng)在交通這個(gè)特殊行業(yè)的典型應(yīng)用。在車聯(lián)網(wǎng)體系參考模型中主要包括三層:數(shù)據(jù)感知....
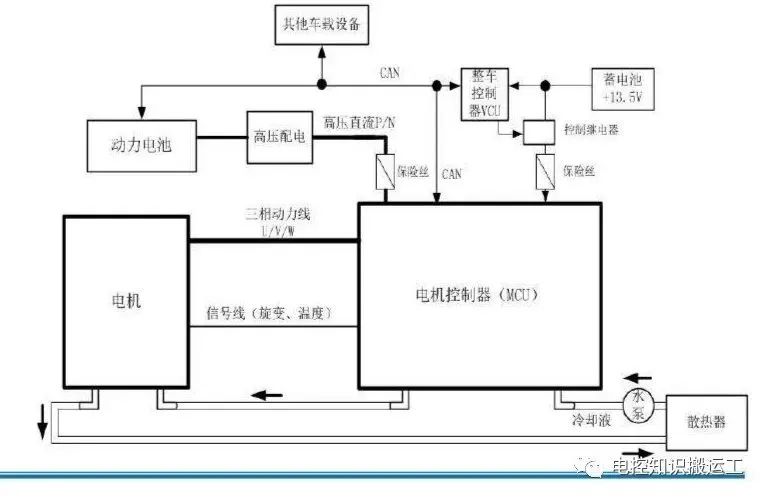
mcu是汽車的什么 MCU介紹
MCU 電機(jī)控制器是連接電機(jī)與電池的神經(jīng)中樞,用來調(diào)校整車各項(xiàng)性能,足夠智能的電控不僅能保障車輛的基....
BMS電池管理系統(tǒng)關(guān)鍵技術(shù)
BMS 電池管理系統(tǒng)(英語:Battery Management System,縮寫B(tài)MS)是對(duì)電池....
VCU整車控制器的作用
VCU 整車控制器是用在純電車型中的控制器,其功能類似于燃油車的發(fā)動(dòng)機(jī)控制器(EMS),是新能源車輛....
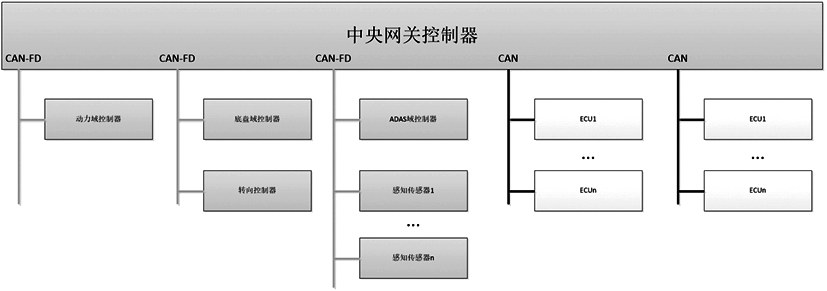
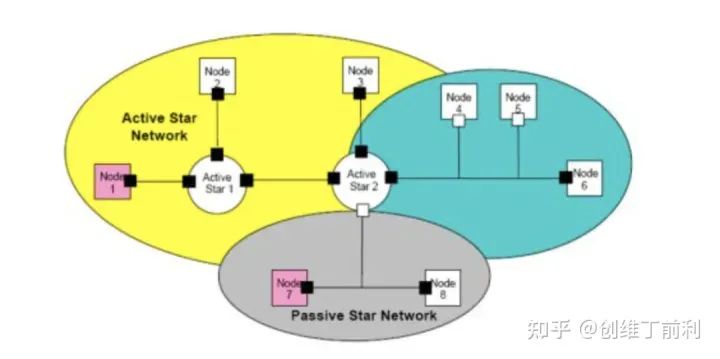
汽車網(wǎng)絡(luò)架構(gòu)是什么意思
基于CAN-FD的新一代汽車網(wǎng)絡(luò)架構(gòu) 傳統(tǒng)的車載CAN總線最高支持500 kbit/s的傳輸速率,每....
CAN-FD協(xié)議有哪些車用
以某車型為例,該項(xiàng)目已對(duì)CAN-FD網(wǎng)絡(luò)進(jìn)行了量產(chǎn)化應(yīng)用,該項(xiàng)目基于電子電氣功能架構(gòu)搭建了集合多種車....
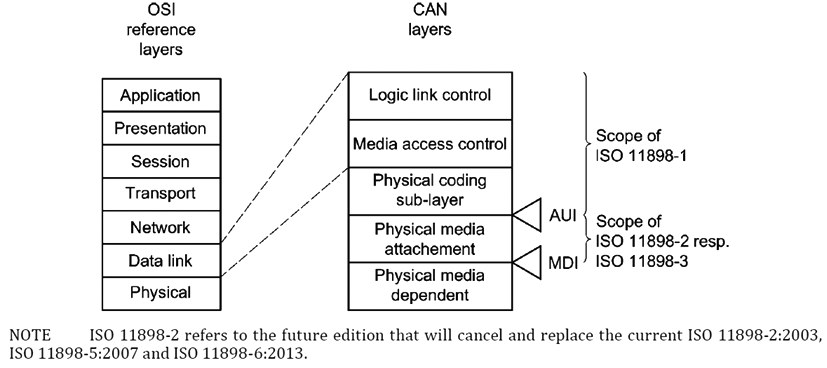
CANFD協(xié)議 CANFD優(yōu)勢(shì)分析
CAN-FD概述 1.1 基于OSI參考模型的CAN-FD 協(xié)議分層 CAN-FD 的協(xié)議架構(gòu)(網(wǎng)絡(luò)....
以太網(wǎng)物理層芯片的作用
1、以太網(wǎng)物理層(PHY)芯片 以太網(wǎng)物理層(PHY)芯片系以太網(wǎng)傳輸?shù)奈锢斫涌谑瞻l(fā)器。應(yīng)用于通信、....
汽車域控制器的功能與作用
汽車域控制器是伴隨著整車電子電器架構(gòu)的演變產(chǎn)生的。ECU增多——數(shù)量多的ECU錯(cuò)綜交錯(cuò),不僅帶來了十....
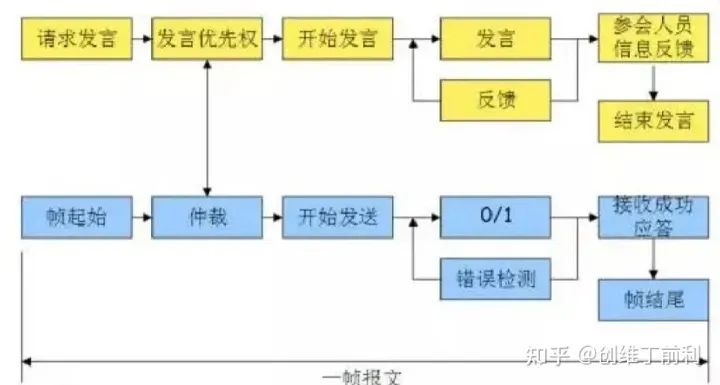
CAN FD報(bào)文時(shí)間計(jì)算
可以根據(jù)波特率算出不同類型報(bào)文時(shí)間,計(jì)算公式如下: 報(bào)文時(shí)間 = 仲裁域位時(shí)間 * 仲裁域位數(shù) + ....
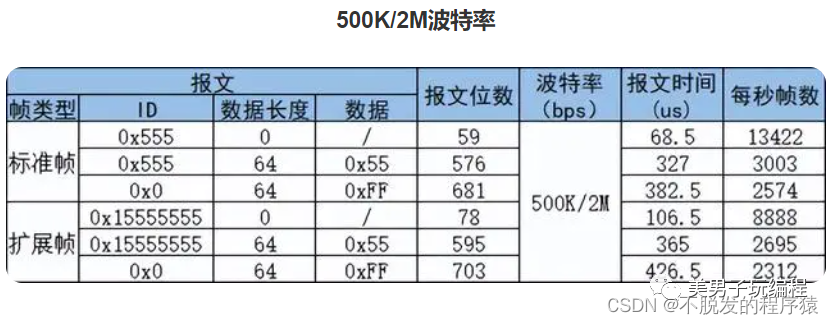
一幀CAN報(bào)文多少字節(jié)
一幀CAN FD報(bào)文位數(shù) 根據(jù)CAN FD幀結(jié)構(gòu)組成,可以算出一幀CAN FD報(bào)文位數(shù): CAN F....
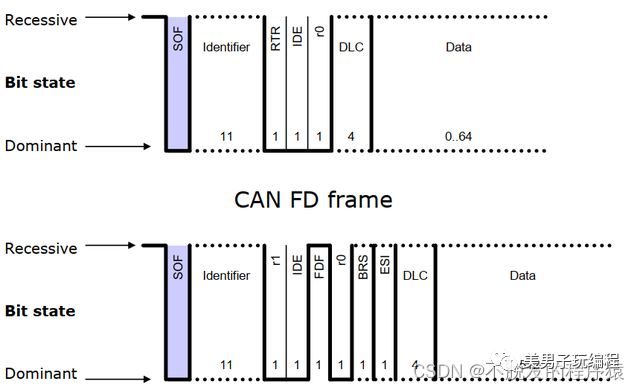
CAN FD幀結(jié)構(gòu)介紹
CAN FD幀結(jié)構(gòu) CAN FD節(jié)點(diǎn)可以正常收、發(fā)CAN報(bào)文,但CAN節(jié)點(diǎn)不能正確收、發(fā)CAN FD....
CAN FD是什么意思 優(yōu)點(diǎn)有哪些
隨著總線技術(shù)在汽車電子領(lǐng)域越來越廣泛和深入的應(yīng)用,特別是自動(dòng)駕駛技術(shù)的迅速發(fā)展,汽車電子對(duì)總線寬度和....
ADAS的八大功能系統(tǒng)介紹
本文主要給大家重點(diǎn)介紹一下ADAS的八大功能系統(tǒng)。 一、車道偏離預(yù)警系統(tǒng) LDWS車道偏離預(yù)警系統(tǒng)L....
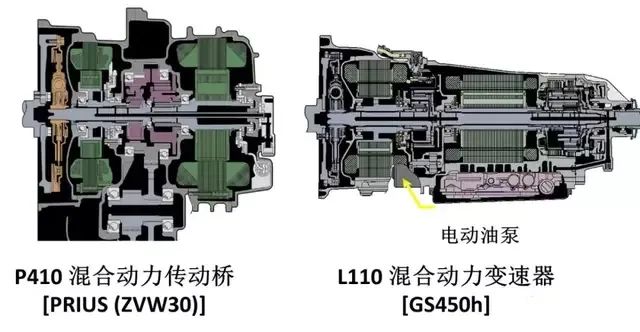

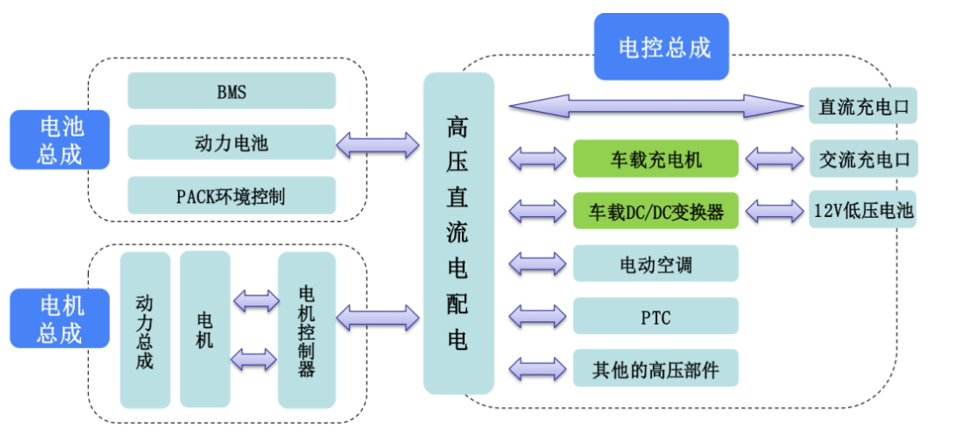
新能源車結(jié)構(gòu)與原理
油電混合,俗稱--混合動(dòng)力。 并聯(lián)式、串聯(lián)式、混聯(lián)式。 弱混、中混、重混。 非插電式、插電式。 電池....
使用同步接口讀取鼠標(biāo)數(shù)據(jù)的方法
編寫源碼 # include # include # include # include # inc....
USB鼠標(biāo)驅(qū)動(dòng)程序上機(jī)實(shí)驗(yàn)
上機(jī)實(shí)驗(yàn) 需要重新配置內(nèi)核,去掉內(nèi)核自帶的驅(qū)動(dòng)程序。在內(nèi)核目錄下執(zhí)行"make menuconfig....
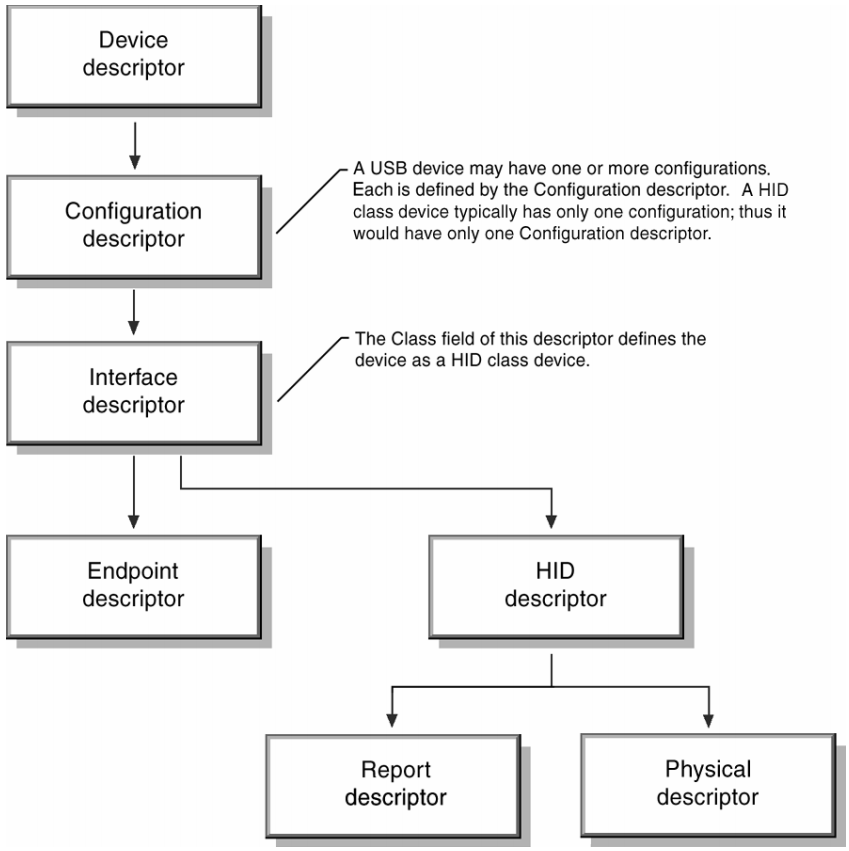
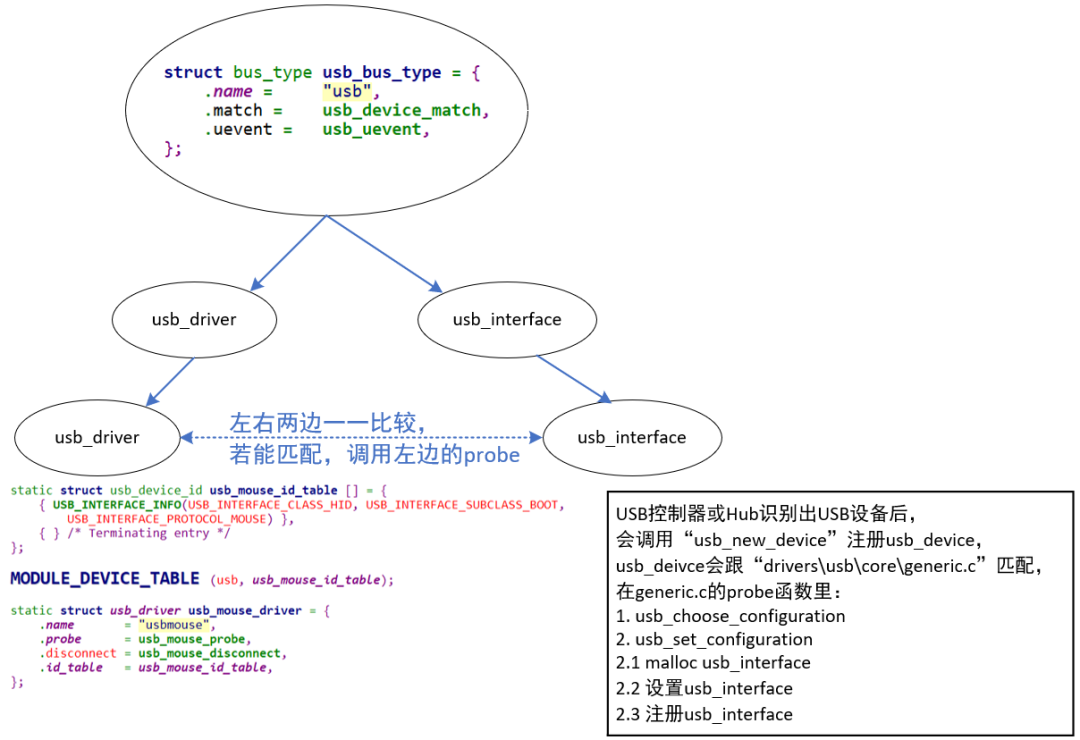
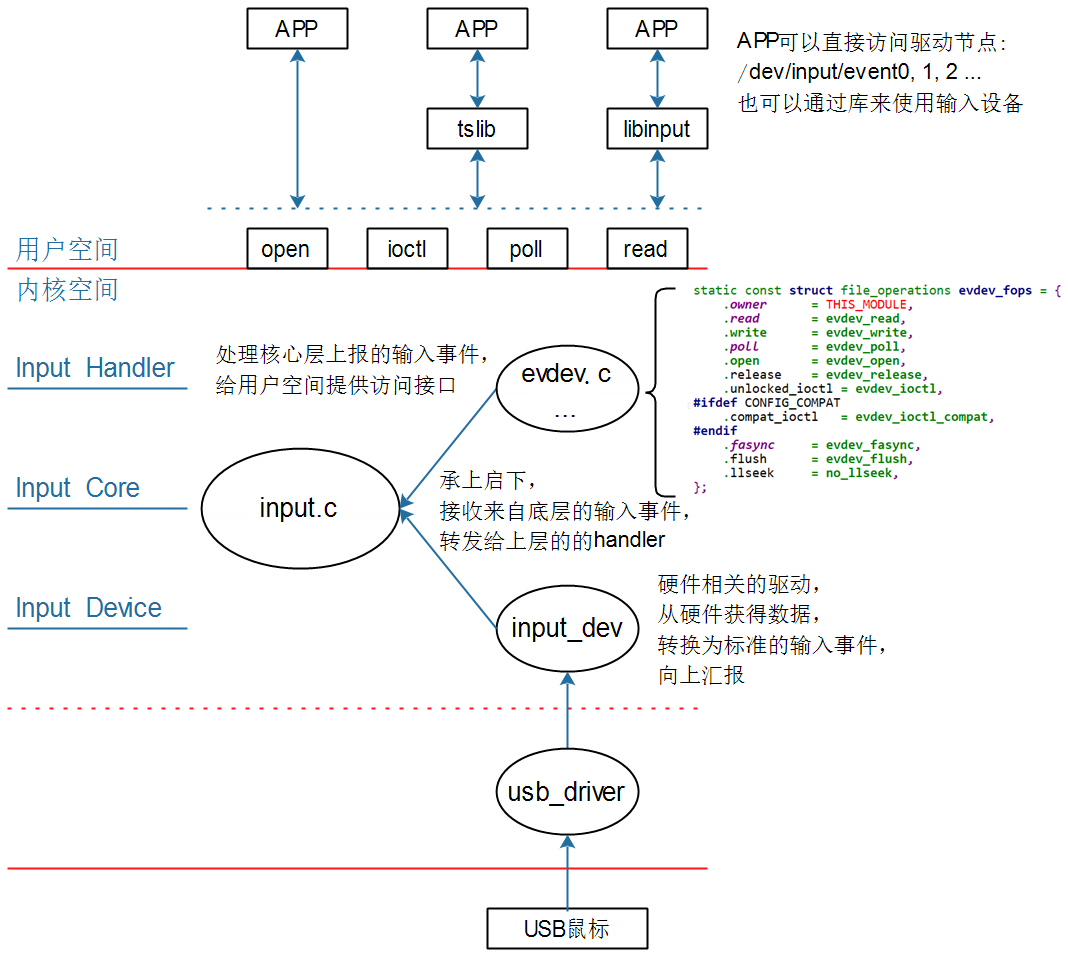
USB鼠標(biāo)驅(qū)動(dòng)程序編程
1. 目標(biāo) 使用鼠標(biāo)模擬按鍵:左鍵相當(dāng)于"L"、右鍵相當(dāng)于"S"、"中鍵"相當(dāng)于 "回車"。 2. ....

Battery Charging介紹
BC1.2 spec 定義了設(shè)備通過 USB 端口充電的檢測(cè)、控制和報(bào)告機(jī)制,這些機(jī)制是 USB2.....

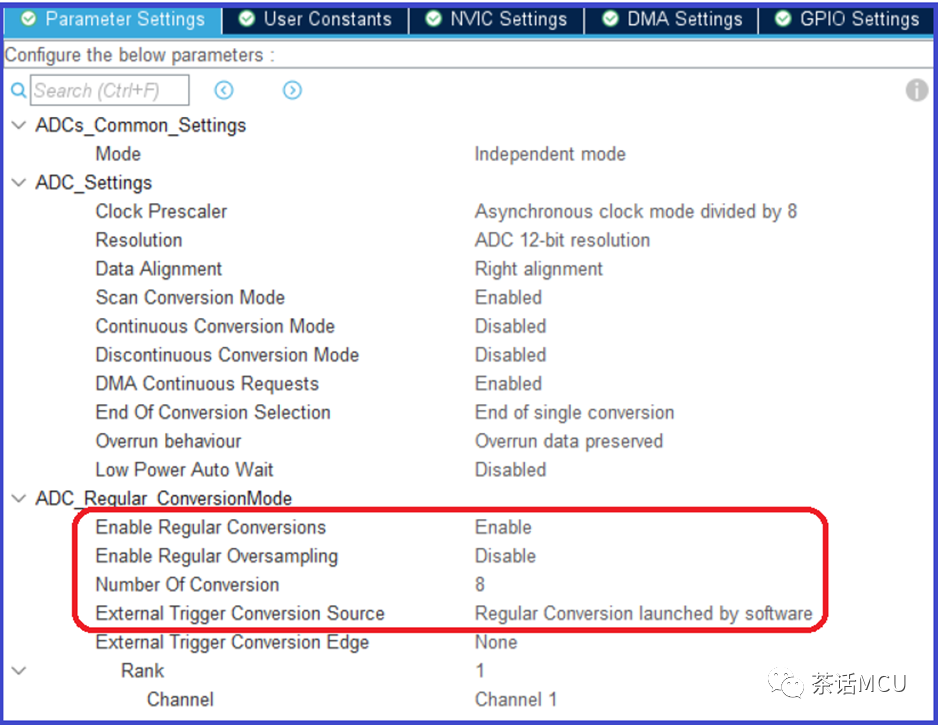
使用STM32ADC看門狗測(cè)量出待測(cè)信號(hào)
我們?cè)谧鯝DC應(yīng)用時(shí),有些場(chǎng)合需要精確測(cè)量出待測(cè)信號(hào)的數(shù)據(jù),有時(shí)可能并不關(guān)心ADC結(jié)果多準(zhǔn)確,只要滿....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)