

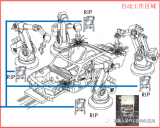
KUKA C4掉電極帽關(guān)水的原因
控制RIP的USER程序在這里.正常情況下這個是大眾統(tǒng)一的標準程序.我只能說出像問題的概率是很低的!....
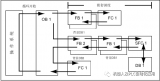
一文知道UP/MAKRO程序的調(diào)用
該指令可用于調(diào)用子程序并將子程序調(diào)用鏈接到條件(布爾操作數(shù))。如果需要,可以鏈接多個操作數(shù)(最多11....


一文知道PROFINET總線用戶命名規(guī)范
工業(yè)以太網(wǎng)在進行數(shù)據(jù)交換時使用它自己的協(xié)議,該協(xié)議在訪問模塊時不使用 TCP/IP 協(xié)議,而使用正確....

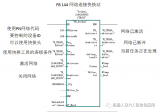
VASS標準PN的網(wǎng)絡開關(guān)站功能FB_144 FB_Docken
如果在 SFC12 中沒有需要激活或去活的任務,則讀出設備的當前狀態(tài)。若某個設備被去活,則將其輸入....


KPP和KSP的故障判斷
如果在初始化階段中出現(xiàn)故障,則中間的軸調(diào)節(jié)器 LED 閃爍。其他 LED 指示燈熄滅。軸調(diào)節(jié)器的紅色....
西門子RFID與PLC的讀寫器
在 SIMATIC S7 上運行 RF180C 時,為用戶提供了方便的函數(shù)塊 (FB 45/FB 5....
使用運行系統(tǒng)仿真器仿真獨立于程序的已連接PLC變量的過程值
此時會啟動運行系統(tǒng)仿真。 啟動仿真后,“運行系統(tǒng)仿真器”(RT Simulator) 窗口中將顯示....


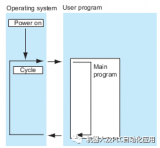
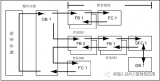
西門子PLC用于循環(huán)程序處理的組織塊(OB1)
掃描循環(huán)時間是操作系統(tǒng)運行循環(huán)程序和中斷循環(huán)的所有程序部分(例如,執(zhí)行其它組織塊)以及系統(tǒng)操作(如,....
存儲卡的工作方式
如果用作程序卡,則可以在存儲卡上裝載用戶程序。這種情況下,存儲卡將替代設備的內(nèi)部裝載存儲器,且內(nèi)部裝....
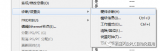
博途CPU1500顯示屏
對于顯示屏較小的 CPU,經(jīng)常會超出顯示屏可用寬度。如果將光標放置在顯示屏的相關(guān)值處并按下左箭頭鍵,....
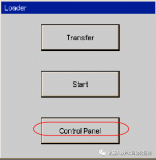
使用KUKA控制器隨附的軟件來操作機器人控制器
指定機械手控制器是否為Office PC。通常不是這種情況,即不要激活復選框。(Office PC ....
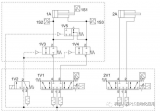



鋁打磨間的PID控制冷卻系統(tǒng)的控制與升溫系統(tǒng)的控制!
FB41用于通過使用連續(xù)的變量輸出在SIMATIC S7控制系統(tǒng)中實現(xiàn)技術(shù)過程控制。除了設定點操作和....







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
