KUKA鏈接機器人程序分析
利用子程序技術(shù)可將機器人程序模塊化,因而可以有效地按結(jié)構(gòu)設(shè)計程序。
KUKAC4測量工具坐標(biāo)的作用是什么
BASE坐標(biāo)用來確定機器人空間上的坐標(biāo)點,而TOOL則用來確定機器人以什么樣的姿態(tài)去這個軌跡點.
WINCC博途以太網(wǎng)下載方式分享
帶以太網(wǎng)口的西門子一代精簡面板和二代精簡面板均支持以太網(wǎng)下載,本章使用TKP600Basic col....
用VARSTATE()可以詢問變量的狀態(tài)
ARSTATE() 是帶有 VAR_STATE 類型返還值的函數(shù)。VAR_STATE 是在系統(tǒng)中如下....
KUKA機器人結(jié)構(gòu)化機器人程序分析
KRL 是一種類似PASCAL的高級編程語言,利用KRL語言編程能夠?qū)崿F(xiàn)結(jié)構(gòu)化編程處理復(fù)雜的任務(wù)。
MOVIFIT更換EBOX+指示燈步驟說明
必要時可以根據(jù)實際運行情況關(guān)閉電壓層 24V_S,以便集中關(guān)閉設(shè)備內(nèi)的執(zhí)行器 。
F-CPU進入STOP模式的操作步驟
F-CPU 進入 STOP 模式,在診斷緩沖區(qū)出現(xiàn) “Data corruption in the ....
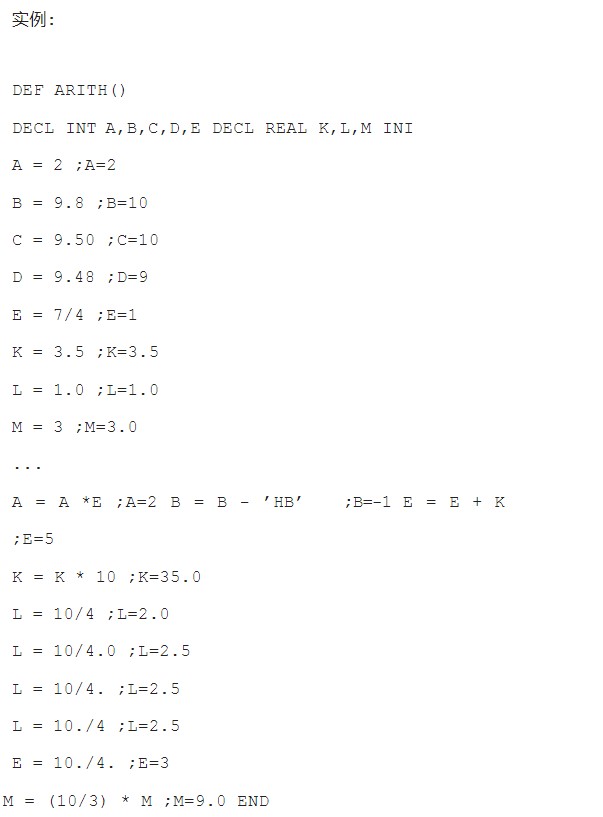
KUKA機器人的幾何運算符_$介紹
用幾何運算符可以以幾何方式相加位置。幾何相加也被稱之為 “Frame 運算”。
基于以太網(wǎng)的SIMATIC NET服務(wù)器與S7-1200通信
這種組態(tài)方式可以實現(xiàn) OPC UA 客戶端通過 SIMATIC NET 訪問 S7-1200 CPU....
KUKA創(chuàng)建新的SUB程序操作步驟
Cell:現(xiàn)有的 Cell 程序,只能被替換或者在刪除 Cell 程序后重新創(chuàng)建。
HALCON機器視覺算法包解析
最近一直在使用機器人與上位機進行視覺抓取技術(shù)的調(diào)試,對C# 也稍有了解,就這樣我開始接觸到了HALC....
SCL用GOTO語句執(zhí)行程序跳轉(zhuǎn)
用GOTO語句能夠執(zhí)行程序跳轉(zhuǎn)。此引起立即跳轉(zhuǎn)到指定標(biāo)號,為此而到同塊中不同的語句。
KUKA機器人:將參數(shù)傳遞到子程序或函數(shù)中V1.28版
從一個主程序中可以將參數(shù)傳遞到局部或全局子程序和函數(shù)中。
西門子CPU-1200在線和診斷工具-比較離線CPU與在線CPU
可以將在線 CPU 中的代碼塊與項目中的代碼塊進行比較。如果項目中的代碼塊與在線 CPU的代碼塊不匹....
S7-1500和S7-1200 F-CPU間Flexible F-Link通信
從STEP7 Safety V15.1開始,S7-1200和S7-1500 F-CPU間可以通過Fl....
SCL:STRUCT和UDT類型變量的賦值
STRUCT和UDT類型變量是表示一個完整結(jié)構(gòu)或一個結(jié)構(gòu)元素的結(jié)構(gòu)化變量。
BUFF傳送連的使用調(diào)試V1.27版分析
當(dāng)小車通過通行檢測傳感器以及上件積放停止器上無小車時,傳感器會將反饋給PLC ,PLC會給出一個可以....
淺析ENDWHILE編程設(shè)定當(dāng)型循環(huán)
當(dāng)型循環(huán)。一直重復(fù)指令塊直到滿足了特定條件的循環(huán)。如果不滿足條件,則用 ENDWHILE 后的下一個....
KUKA 8.2系統(tǒng)遠(yuǎn)程連接簡析
實現(xiàn)遠(yuǎn)程訪問需要在KLIconfig.xml文件里進行更改設(shè)置.
滾床控制SEW變頻器MOVIfit的PLC控制/S11安全控制設(shè)置
功能:改變電壓及頻率,SEW程序部分,初始化及IPOS程序(AM1001).
結(jié)構(gòu)數(shù)據(jù)類型Struct介紹
Struct類型是一種由多個不同數(shù)據(jù)類型元素組成的數(shù)據(jù)結(jié)構(gòu),其元素可以是基本數(shù)據(jù)類型,也可以是Str....
S7 Fault Tolerant connection/S7容錯連接介紹
S7容錯連接是S7-400H(High available高可用性)系列CPU才能支持的冗余通訊方式....
S7-300集成PN口作為Profinet智能設(shè)備
如圖1所示,S7-300 PLC(192.168.0.1/24)與 S7-1500 PLC (192....
S7-300集成PN口作為Profinnet控制器使用
PROFINET IO的IO現(xiàn)場設(shè)備在PROFINET上有著相同的等級,在網(wǎng)絡(luò)組態(tài)時分配給一個IO控....
VASS-KUKA機器人力矩監(jiān)控TECH2_ Koll_Ueb變量的控制使用簡介
如果機器人與物體碰撞,則機器人控制器會增加軸轉(zhuǎn)矩以克服阻力。這可能會損壞機器人,工具或其他物體。
KUKA機器人8.3V標(biāo)準(zhǔn)版扭矩監(jiān)控簡析
公差范圍不自動由機器人控制系統(tǒng)確定,而是必須由用戶進行定義。
S7-300集成DP口與S7-200的DP主從通信設(shè)計實現(xiàn)
S7-300與S7-200通過EM277 進行PROFIBUS DP通訊,需要在STEP7中進行S7....
KUKA大眾版8.2系統(tǒng)外部軸配置
KUKA大眾版8.2系統(tǒng),配置外部軸需要在項目中進行設(shè)置選擇KPP1項目用于外部軸1和KPP2使用外....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)