
音視頻音頻編碼介紹
音頻技術(shù)是為了記錄、存儲(chǔ)和回放聲學(xué)現(xiàn)象才發(fā)明的,所以先了解聲學(xué)現(xiàn)象對(duì)學(xué)習(xí)數(shù)字音頻是有很大幫助的。 音....
數(shù)字音頻 聲音的基礎(chǔ)知識(shí)
聲音的基礎(chǔ)知識(shí) 聲音的產(chǎn)生是由于物體的振動(dòng),造成空間內(nèi)空氣的波動(dòng)而共鳴發(fā)音,再由大氣的傳播,使人的聽....
訪問(wèn)PCI/PCIe設(shè)備的流程
訪問(wèn) PCI/PCIe 設(shè)備的流程 PCI/PCIe 設(shè)備的配置信息 PCI/PCIe 設(shè)備上有配置....
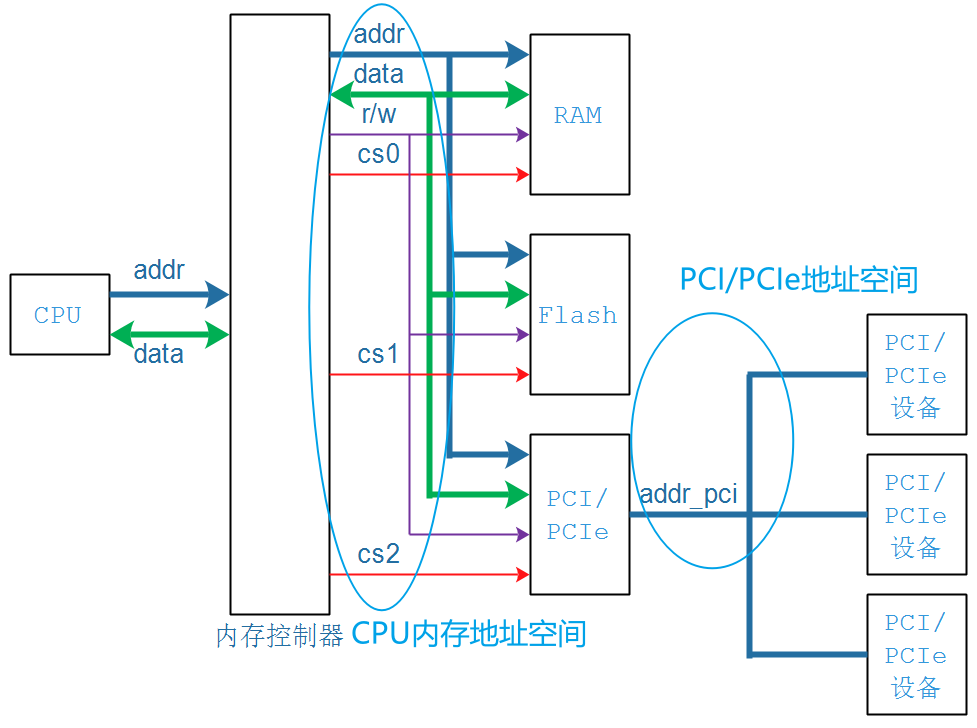
PCI/PCIe最容易訪問(wèn)的設(shè)備是什么
最容易訪問(wèn)的設(shè)備是什么 是內(nèi)存! 要讀寫內(nèi)存,知道它的地址就可以: volatile unsigne....
STM32U5系列片內(nèi)ADC1和ADC4實(shí)現(xiàn)過(guò)程(下)
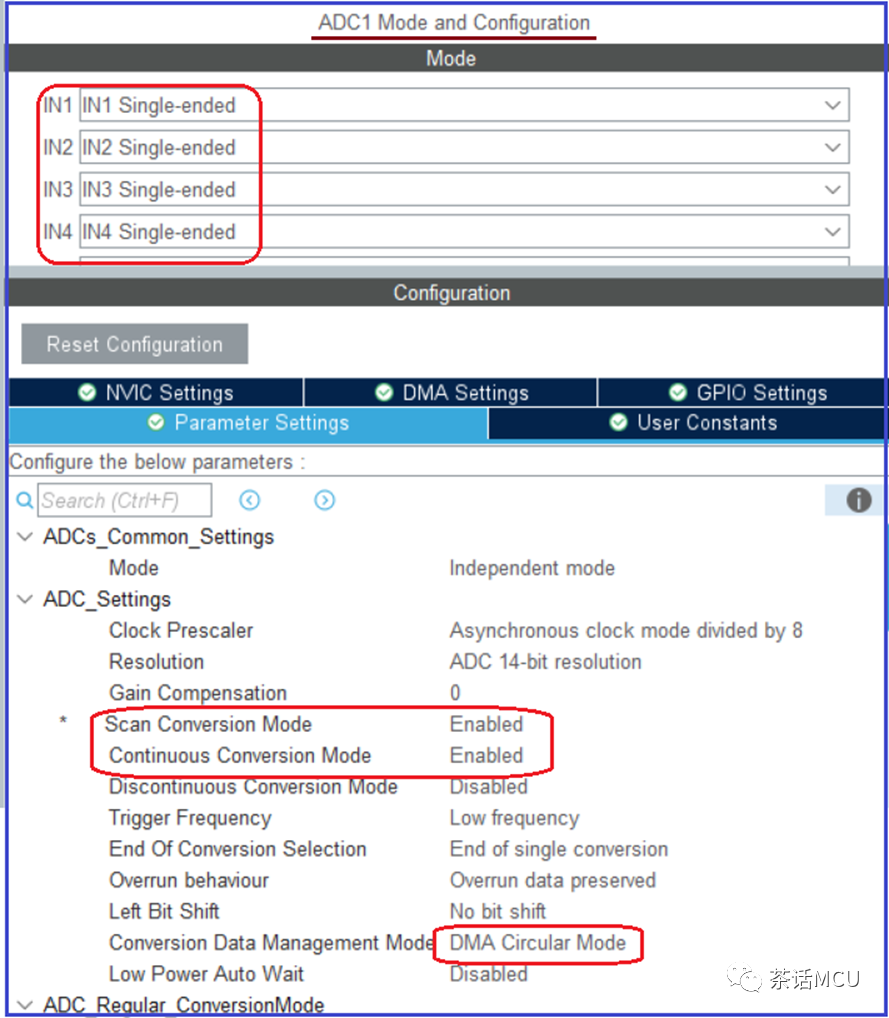
現(xiàn)在對(duì)ADC4基于DMA鏈表模式做演示,其實(shí)就一個(gè)節(jié)點(diǎn)。 選擇ADC4的4個(gè)內(nèi)部信號(hào)通道,掃描模式,....
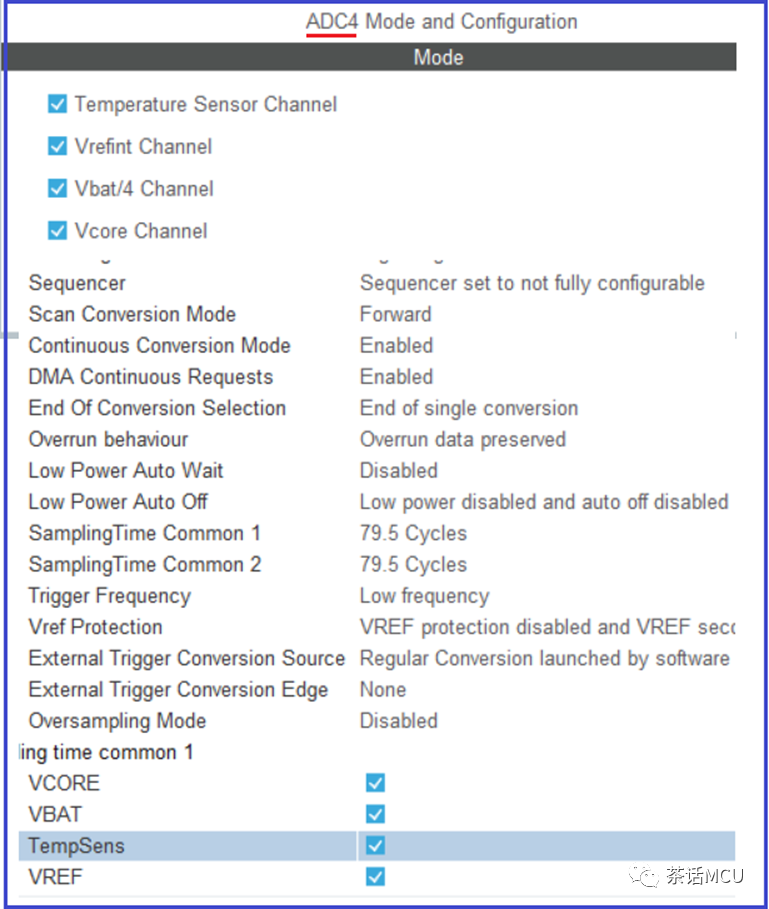
STM32U5系列片內(nèi)ADC1和ADC4實(shí)現(xiàn)過(guò)程(上)
有人使用STM32U5系列MCU開發(fā)產(chǎn)品,在用到ADC結(jié)合DMA傳輸時(shí)遇到點(diǎn)障礙,這里針對(duì)片內(nèi)ADC....
Linux內(nèi)核網(wǎng)絡(luò)擁塞控制算法的實(shí)現(xiàn)框架(三)
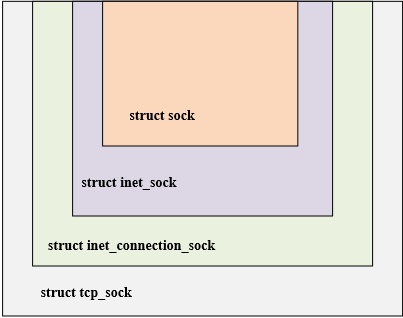
下面看一個(gè)特別重要的框架,也可以稱為是擁塞控制引擎,如下結(jié)構(gòu)體所示, tcp_congestion_....

Linux內(nèi)核網(wǎng)絡(luò)擁塞控制算法的實(shí)現(xiàn)框架(二)
從上面的概念中可以得知,擁塞窗口可以間接反映網(wǎng)絡(luò)的狀況,進(jìn)而去限制發(fā)送窗口的大小。擁塞窗口作為網(wǎng)絡(luò)擁....
Linux內(nèi)核網(wǎng)絡(luò)擁塞控制算法的具體實(shí)現(xiàn)框架(一)
談起網(wǎng)絡(luò)擁塞控制,大家可能很熟悉八股文中的“加法增大“、”乘法減小“、”慢開始“、“擁塞避免”、“快....

Arm64程序調(diào)用通用寄存器的使用方法
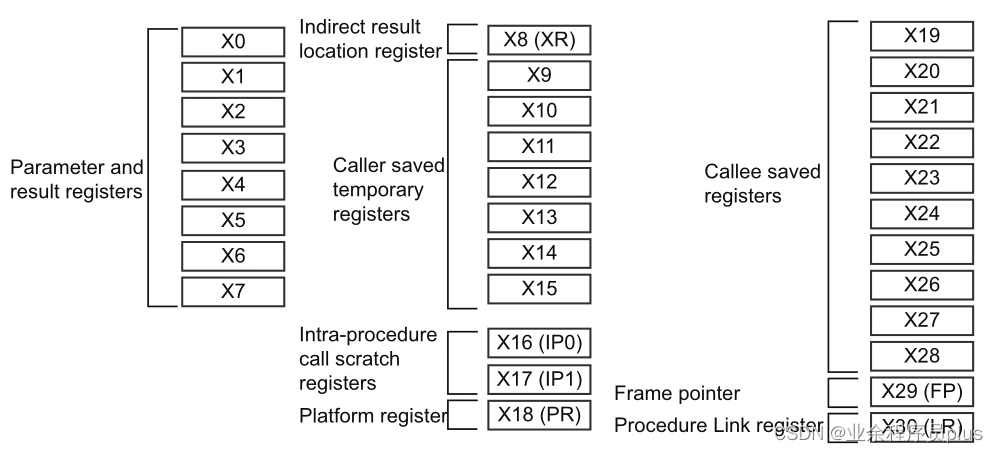
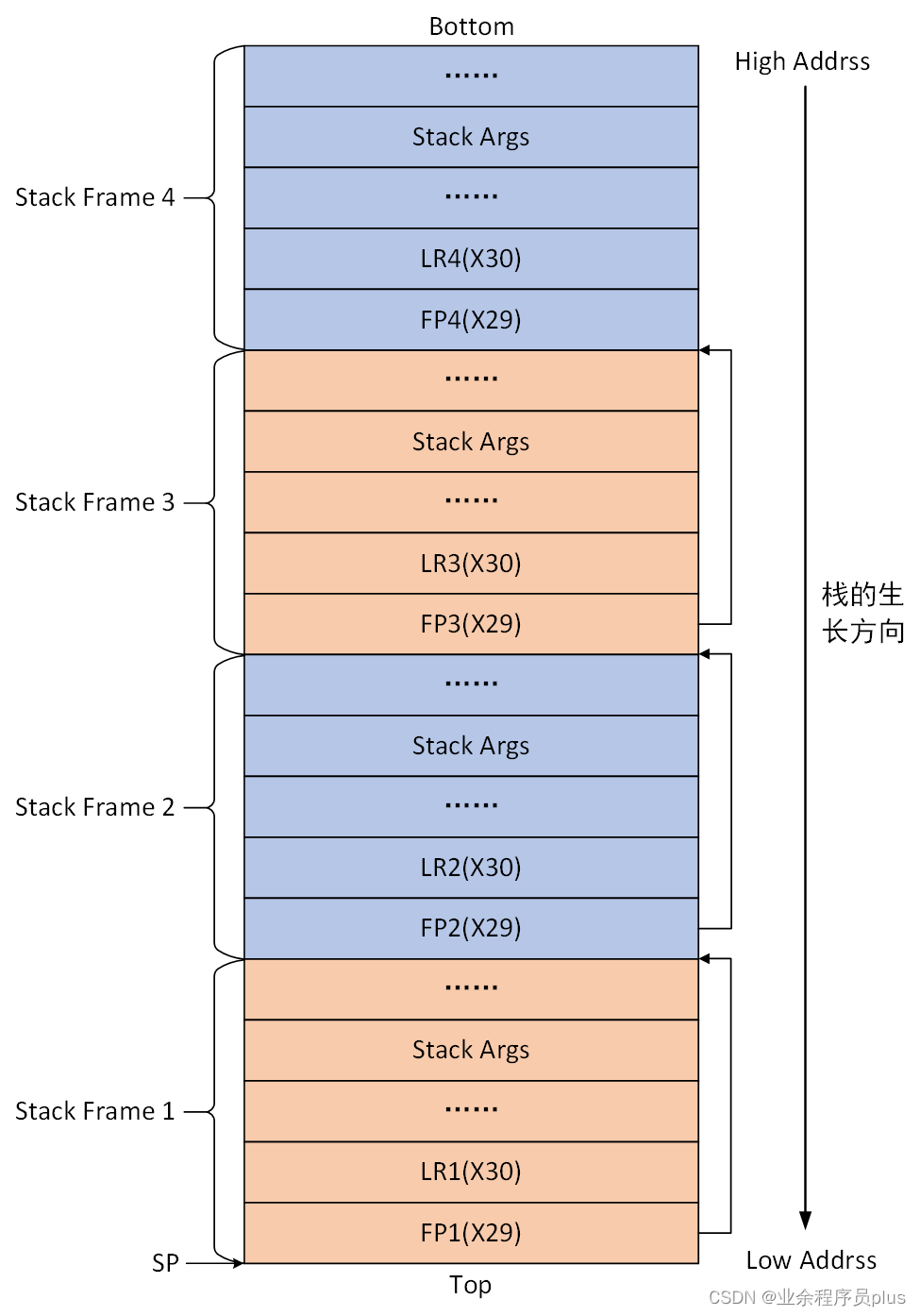
下面是Arm64程序調(diào)用標(biāo)準(zhǔn)規(guī)定的通用寄存器的使用方法。 參數(shù)寄存器(X0-X7) 函數(shù)參數(shù)數(shù)量小于....
驅(qū)動(dòng)電機(jī)控制器的主要功能有哪些
驅(qū)動(dòng)電機(jī)控制器的功能 CAN通訊 電機(jī)系統(tǒng)具備高速CAN網(wǎng)絡(luò)通訊功能。 能根據(jù)整車CAN協(xié)議內(nèi)容正確....

電機(jī)控制器的組成 電動(dòng)汽車驅(qū)動(dòng)電機(jī)控制器的基本結(jié)構(gòu)
1.殼體與連接器電機(jī)控制器的殼體的主要用于固定各電子控制元件、電氣控制元件、電氣功率元件及連接器,并....

IGBT集成功率模塊原理簡(jiǎn)圖
電動(dòng)汽車驅(qū)動(dòng)電機(jī)控制器基本結(jié)構(gòu)可分為:殼體、高低壓連接器、電子控制元件、電氣控制元件、電氣功率元件。....

電動(dòng)汽車驅(qū)動(dòng)電機(jī)控制器的作用
電動(dòng)汽車驅(qū)動(dòng)電機(jī)控制器概述 電機(jī)控制器,控制動(dòng)力電源與驅(qū)動(dòng)電機(jī)之間能量傳輸?shù)难b置,由控制信號(hào)接口電路....
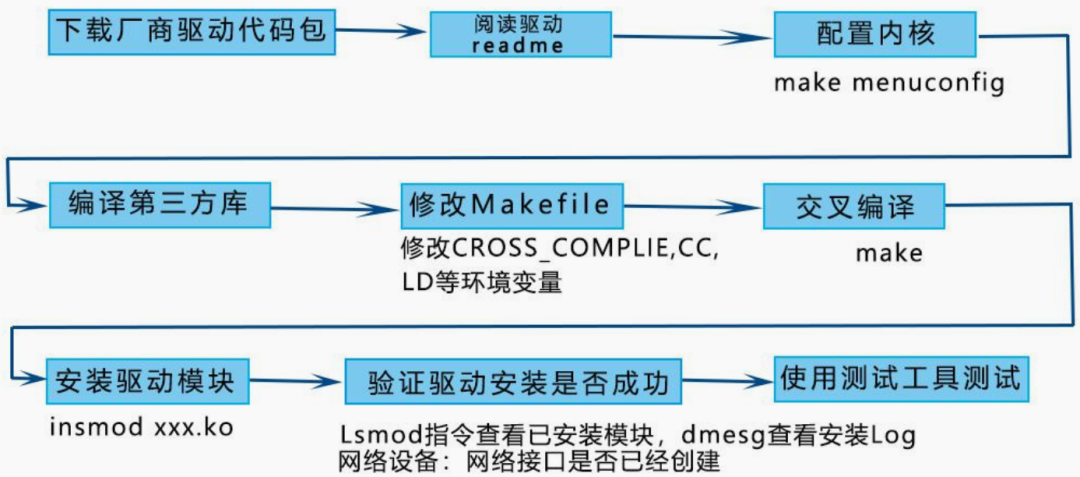
Linux驅(qū)動(dòng)移植 Linux系統(tǒng)架構(gòu)優(yōu)點(diǎn)
系統(tǒng)移植 linux 驅(qū)動(dòng)移植 移植是說(shuō)同樣的一個(gè) linux 操作系統(tǒng),我們可以跑到不同的硬件上面....
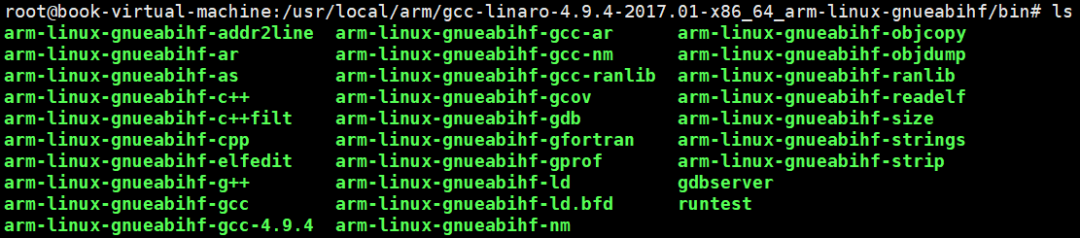
嵌入式Linux系統(tǒng)開發(fā)介紹
Linux 系統(tǒng)開發(fā) 基于 linux 操作系統(tǒng)來(lái)開發(fā)我們的產(chǎn)品叫 linux系統(tǒng)開發(fā)。此開發(fā)的編程....

裸機(jī)編程或單片機(jī)開發(fā)
計(jì)算機(jī)系統(tǒng)的運(yùn)轉(zhuǎn)是系統(tǒng)中軟硬件共同努力的結(jié)果,沒(méi)有硬件的軟件是空中樓閣,而沒(méi)有軟件的硬件則只是一堆廢....

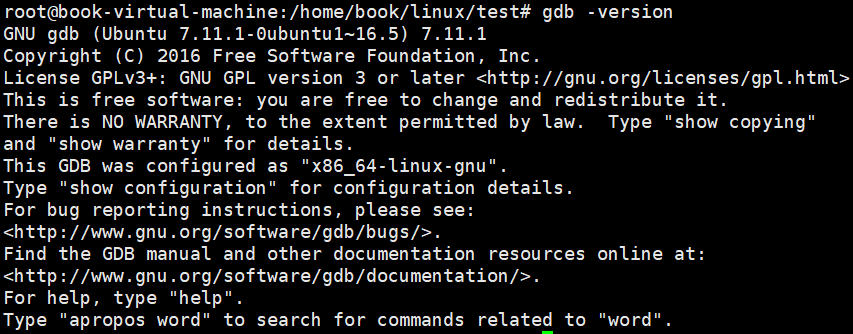
嵌入式Linux GDB是什么
在學(xué)習(xí)單片機(jī)的時(shí)候我們可以通過(guò)集成式 IDE 來(lái)進(jìn)行調(diào)試,比如 MDK、IAR 等。 在嵌入式 li....

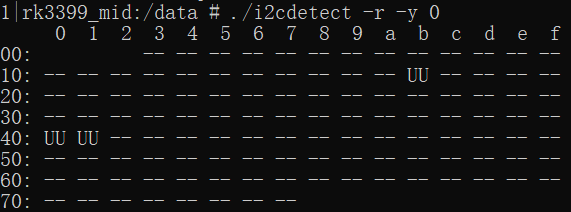
i2c-tools工具的介紹
i2c-tools 簡(jiǎn)介 在嵌入式開發(fā)中,有時(shí)候需要確認(rèn)硬件是否正常連接,設(shè)備是否正常工作,設(shè)備的地....
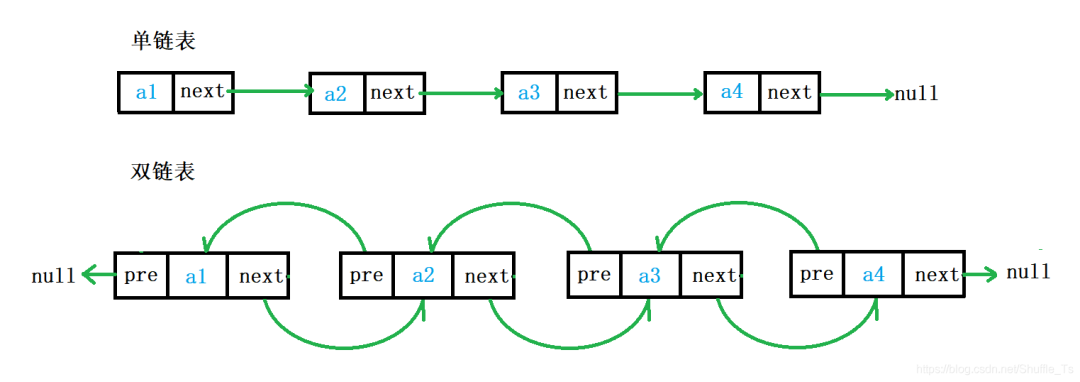
單鏈表和雙鏈表的區(qū)別在哪里
單鏈表和雙鏈表的區(qū)別 單鏈表的每一個(gè)節(jié)點(diǎn)中只有指向下一個(gè)結(jié)點(diǎn)的指針,不能進(jìn)行回溯。 雙鏈表的每一個(gè)節(jié)....
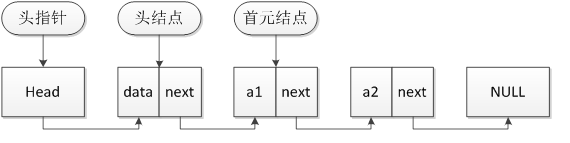
鏈表數(shù)據(jù)結(jié)構(gòu)基本概念
鏈表基本概念 頭指針: 頭指針是指鏈表指向第一個(gè)結(jié)點(diǎn)的指針,若鏈表有頭結(jié)點(diǎn),則是指向頭結(jié)點(diǎn)的指針。 ....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)