") 如何為密集的高約束PCB設(shè)計(jì)創(chuàng)建和管理約束
如何為密集的高約束PCB設(shè)計(jì)創(chuàng)建和管理約束
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
pcb
+關(guān)注
關(guān)注
4319文章
23105瀏覽量
398124 -
設(shè)計(jì)
+關(guān)注
關(guān)注
4文章
818瀏覽量
69905
發(fā)布評論請先 登錄
相關(guān)推薦
和 Dr Peter 一起學(xué) KiCad 4.3:輪廓與約束 (Edge cut板框)
“ ?在本節(jié)中,您將學(xué)會如何繪制 PCB 的板框。 ? ” 4 .3.? 2- 輪廓與約束 (Edge cut板框) 在本章中,我們將完成在本書第三部分第二章中學(xué)到的 PCB 工作流程的第二步。在這
時序約束一主時鐘與生成時鐘
的輸出,對于Ultrascale和Ultrascale+系列的器件,定時器會自動地接入到GT的輸出。 1.2 約束設(shè)置格式 主時鐘約束使用命令create_clock進(jìn)行創(chuàng)建,進(jìn)入Timing

與非門構(gòu)成的基本RS觸發(fā)器的約束條件是什么
觸發(fā)器的約束條件主要涉及輸入信號和輸出信號的狀態(tài)。 以下是與非門構(gòu)成的RS觸發(fā)器的一些基本約束條件: 輸入信號的約束 : RS = 0 :當(dāng)R和S都為0時,觸發(fā)器保持當(dāng)前狀態(tài)不變。這是因?yàn)閮蓚€與非門的輸入都是0,輸出Q和Q'將保
電路的兩類約束指的是哪兩類
電路的兩類約束通常指的是電氣約束和物理約束。這兩類約束在電路設(shè)計(jì)和分析中起著至關(guān)重要的作用。 一、電氣約束 電氣
PCB設(shè)計(jì)與PCB制板的緊密關(guān)系
。以下是它們之間的關(guān)系: PCB設(shè)計(jì)與PCB制板的關(guān)系 1. PCB設(shè)計(jì): PCB設(shè)計(jì)是指在電子產(chǎn)品開發(fā)過程中,設(shè)計(jì)工程師使用專業(yè)的電子設(shè)計(jì)軟件創(chuàng)建
兩種SR鎖存器的約束條件
基本約束條件: SR鎖存器是一種基本的數(shù)字邏輯電路,用于存儲一位二進(jìn)制信息。它有兩個輸入端:S(Set)和R(Reset),以及兩個輸出端:Q和Q'(Q的反相)。以下是SR鎖存器的基本約束
Cadence快板PCB培訓(xùn)
Allegro環(huán)境介紹Allegro環(huán)境設(shè)定 焊盤制作 元件封裝制作 電路板創(chuàng)建PCB疊層設(shè)置和網(wǎng)表導(dǎo)入 約束規(guī)則管理布局 布線 覆銅PCB設(shè)計(jì)
發(fā)表于 07-02 17:22
?0次下載
Xilinx FPGA編程技巧之常用時序約束詳解
今天給大俠帶來Xilinx FPGA編程技巧之常用時序約束詳解,話不多說,上貨。
基本的約束方法
為了保證成功的設(shè)計(jì),所有路徑的時序要求必須能夠讓執(zhí)行工具獲取。最普遍的三種路徑以及異常路徑為
發(fā)表于 05-06 15:51
時序約束實(shí)操
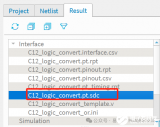
添加約束的目的是為了告訴FPGA你的設(shè)計(jì)指標(biāo)及運(yùn)行情況。在上面的生成約束之后,在Result àxx.sdc中提供約束參考(請注意該文件不能直接添加到工程中,需要熱復(fù)制到別的指定目錄或者新建自己的SDC文件添加到工程)。
Xilinx FPGA的約束設(shè)置基礎(chǔ)
LOC約束是FPGA設(shè)計(jì)中最基本的布局約束和綜合約束,能夠定義基本設(shè)計(jì)單元在FPGA芯片中的位置,可實(shí)現(xiàn)絕對定位、范圍定位以及區(qū)域定位。
發(fā)表于 04-26 17:05
?1221次閱讀
Xilinx FPGA編程技巧之常用時序約束詳解
今天給大俠帶來Xilinx FPGA編程技巧之常用時序約束詳解,話不多說,上貨。
基本的約束方法為了保證成功的設(shè)計(jì),所有路徑的時序要求必須能夠讓執(zhí)行工具獲取。最普遍的三種路徑以及異常路徑為
發(fā)表于 04-12 17:39
機(jī)器人運(yùn)動學(xué)中的非完整約束與運(yùn)動模型推導(dǎo)
機(jī)器人運(yùn)動學(xué)中的運(yùn)動學(xué)約束是指機(jī)器人在運(yùn)動過程中受到的限制,包括位置、姿態(tài)、速度和加速度等因素。這些約束會對機(jī)器人的自由度產(chǎn)生影響,從而影響機(jī)器人的運(yùn)動和控制。運(yùn)動學(xué)約束通常用數(shù)學(xué)模型來描述,為機(jī)器人的運(yùn)動控制提供了理論基礎(chǔ)。

FPGA物理約束之布局約束
在進(jìn)行布局約束前,通常會對現(xiàn)有設(shè)計(jì)進(jìn)行設(shè)計(jì)實(shí)現(xiàn)(Implementation)編譯。在完成第一次設(shè)計(jì)實(shí)現(xiàn)編譯后,工程設(shè)計(jì)通常會不斷更新迭代,此時對于設(shè)計(jì)中一些固定不變的邏輯,設(shè)計(jì)者希望它們的編譯結(jié)果




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論