 電子發(fā)燒友App
電子發(fā)燒友App


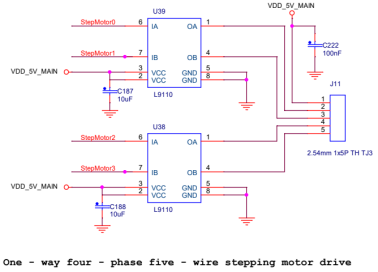
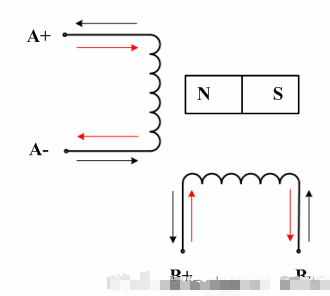
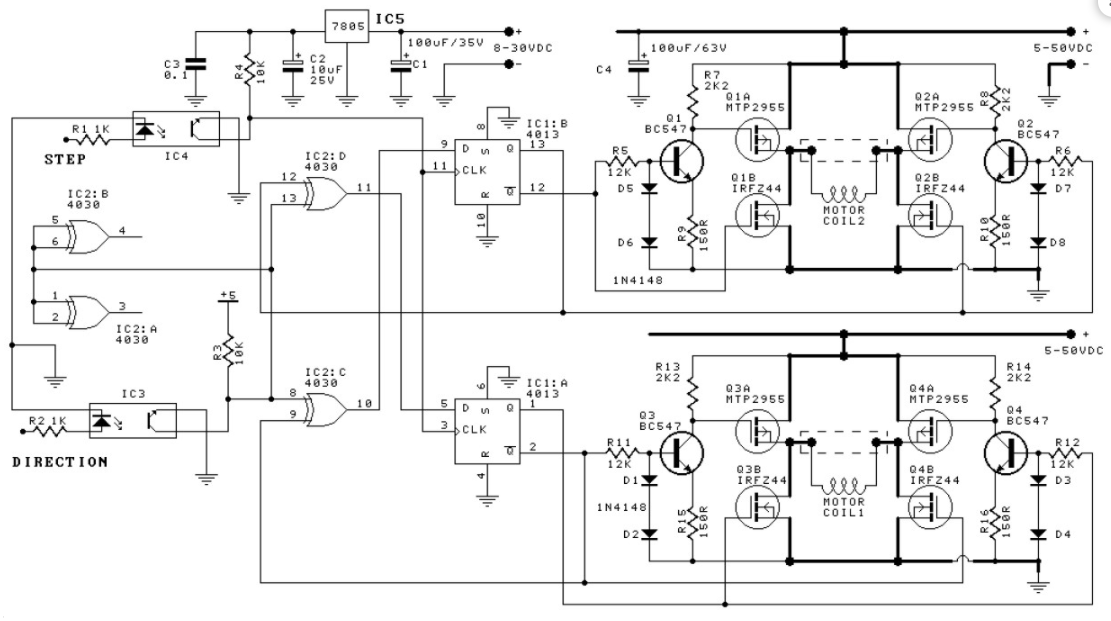
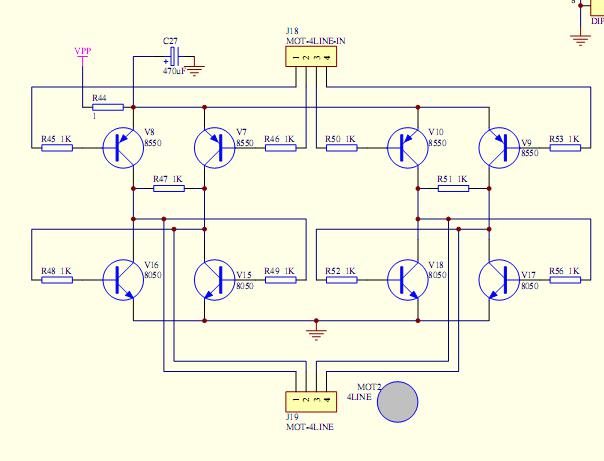
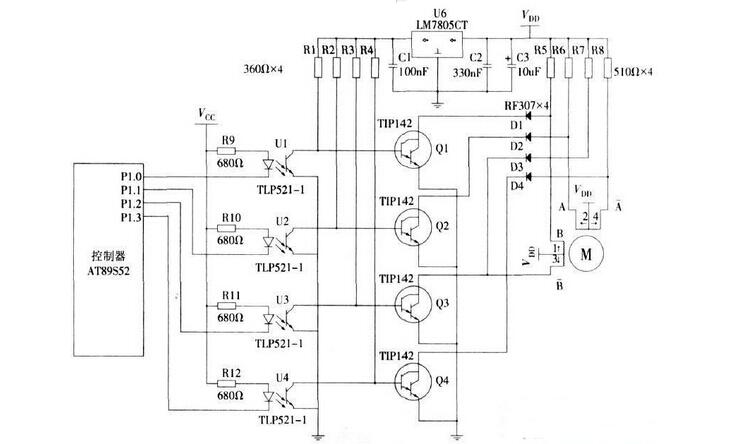
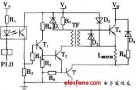
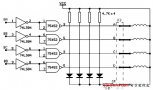
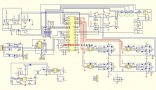
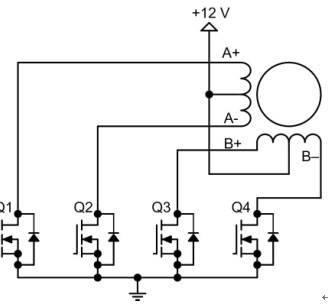
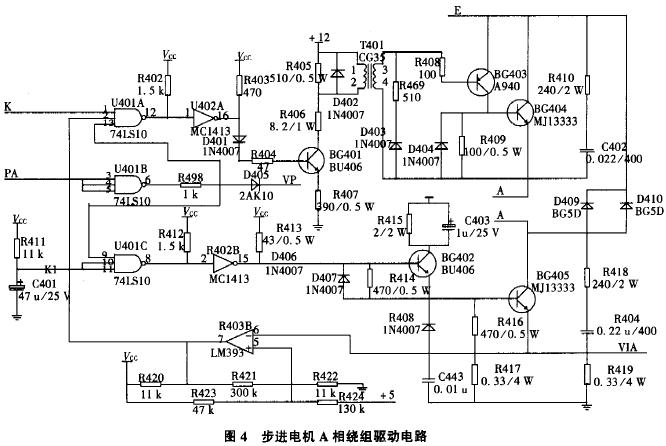
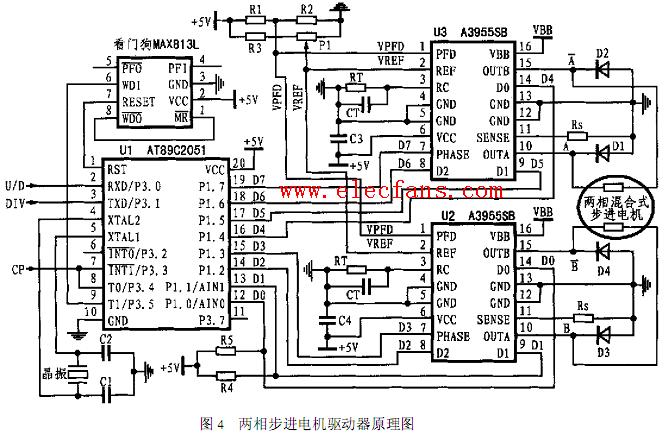
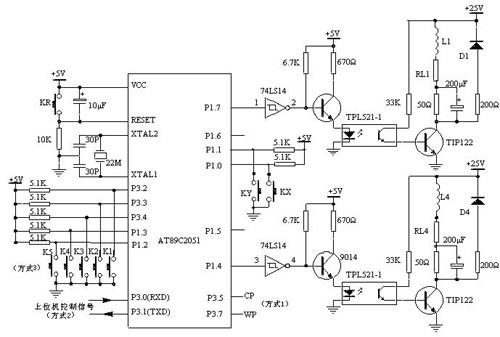
??? 本圖是步進(jìn)電機(jī)驅(qū)動(dòng)電路原理圖。驅(qū)動(dòng)電路通過(guò)ULN2803構(gòu)成比較多的驅(qū)動(dòng)電路,電路圖如圖所示。通過(guò)單片機(jī)的P1.0~P1.3輸出脈沖到ULN2803的1B~4B口,經(jīng)信號(hào)放大后從1C~4C口分別輸出到電機(jī)的A、B、C、D相。

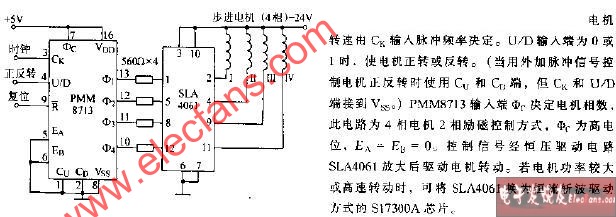
圖 步進(jìn)電機(jī)驅(qū)動(dòng)電路原理圖
圖 步進(jìn)電機(jī)驅(qū)動(dòng)電路原理圖








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論